
SLIDE 1
1
4 March 2005, NVTI day, Utrecht Graph-Based State Spaces 1
Graph-Based State Spaces
Arend Rensink University of Twente
4 March 2005, NVTI day, Utrecht Graph-Based State Spaces 2
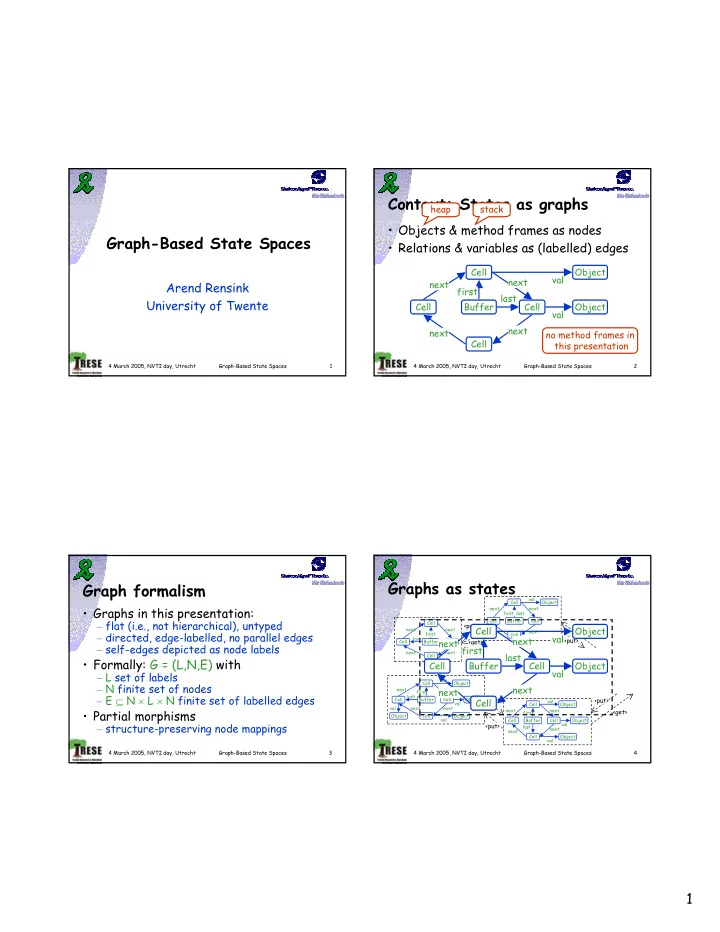
Context: States as graphs
- Objects & method frames as nodes
- Relations & variables as (labelled) edges
Buffer Cell Cell Cell Cell next next next next last first Object Object val val heap stack no method frames in this presentation
4 March 2005, NVTI day, Utrecht Graph-Based State Spaces 3
Graph formalism
- Graphs in this presentation:
– flat (i.e., not hierarchical), untyped – directed, edge-labelled, no parallel edges – self-edges depicted as node labels
- Formally: G = (L,N,E) with
– L set of labels – N finite set of nodes – E ⊆ N × L × N finite set of labelled edges
- Partial morphisms
– structure-preserving node mappings
4 March 2005, NVTI day, Utrecht Graph-Based State Spaces 4
Graphs as states
Buffer Cell Cell Cell Cell next next next next first, last Object val
<put> <get>
Buffer Cell Cell Cell Cell next next next next last first Object Object val val Object val
<put> <get>
Buffer Cell Cell Cell Cell next next next next last first Object Object val val Object val Object val
<put> <get> <put> <get>
Buffer Cell Cell Cell Cell next next next next first last