
SLIDE 1
COMP37111 Toby Howard School of Computer Science The University of Manchester 1
4: Model Acquisition - 2
COMP37111 Advanced Computer Graphics
toby.howard@manchester.ac.uk
1
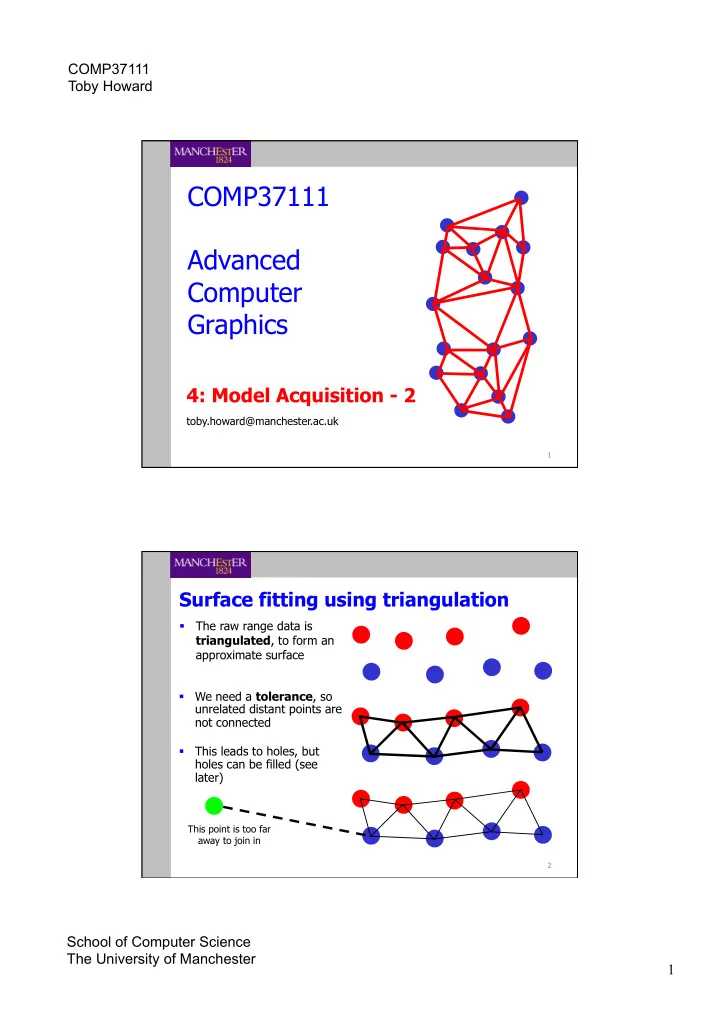
Surface fitting using triangulation
§ We need a tolerance, so unrelated distant points are not connected § This leads to holes, but holes can be filled (see later)
2
§ The raw range data is triangulated, to form an approximate surface
This point is too far away to join in