
SLIDE 1
1
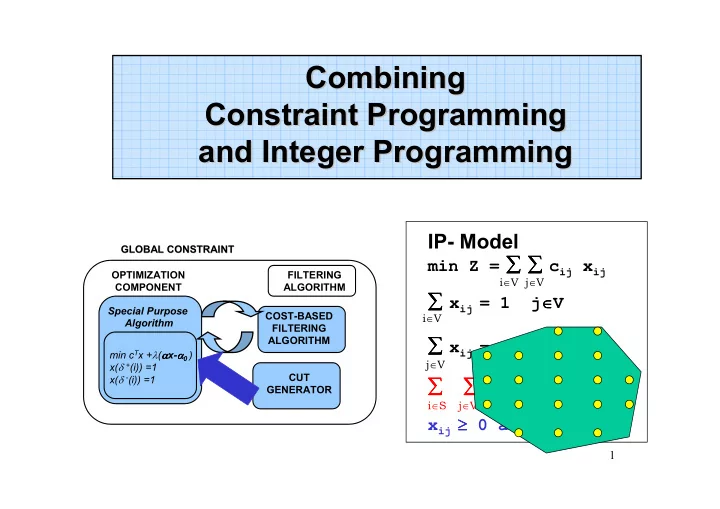
IP- Model
min Z = ∑
∑ ∑ ∑ ∑ ∑ ∑ ∑ cij xij ∑ ∑ ∑ ∑ xij = 1
j∈ ∈ ∈ ∈V
∑ ∑ ∑ ∑ xij = 1
i∈ ∈ ∈ ∈V
∑ ∑ ∑ ∑ ∑ ∑ ∑ ∑ xij ≥
≥ ≥ ≥ 1 S⊂ ⊂ ⊂ ⊂V S≠∅ ≠∅ ≠∅ ≠∅ xij ≥ ≥ ≥ ≥ 0 and integer
i∈V j∈V i∈V j∈V i∈S j∈V\S
Combining Combining Constraint Programming Constraint Programming and Integer Programming and Integer Programming
GLOBAL CONSTRAINT GLOBAL CONSTRAINT COST-BASED FILTERING ALGORITHM OPTIMIZATION COMPONENT FILTERING ALGORITHM min cTx +λ(α α α αx-α α α α0 ) x(δ +(i)) =1 x(δ -(i)) =1 Special Purpose Algorithm CUT GENERATOR