
SLIDE 1
1
- 2006 Wiley & Sons
Lines and Coordinates Device Coordinates Logical Coordinates Converting Between Logical and Device
Coordinates
Mapping From Logical to Device Coordinates
Anisotropic mapping Isotropic mapping
Chapter 1 Elementary Concepts
- 2006 Wiley & Sons
Lines and Coordinates
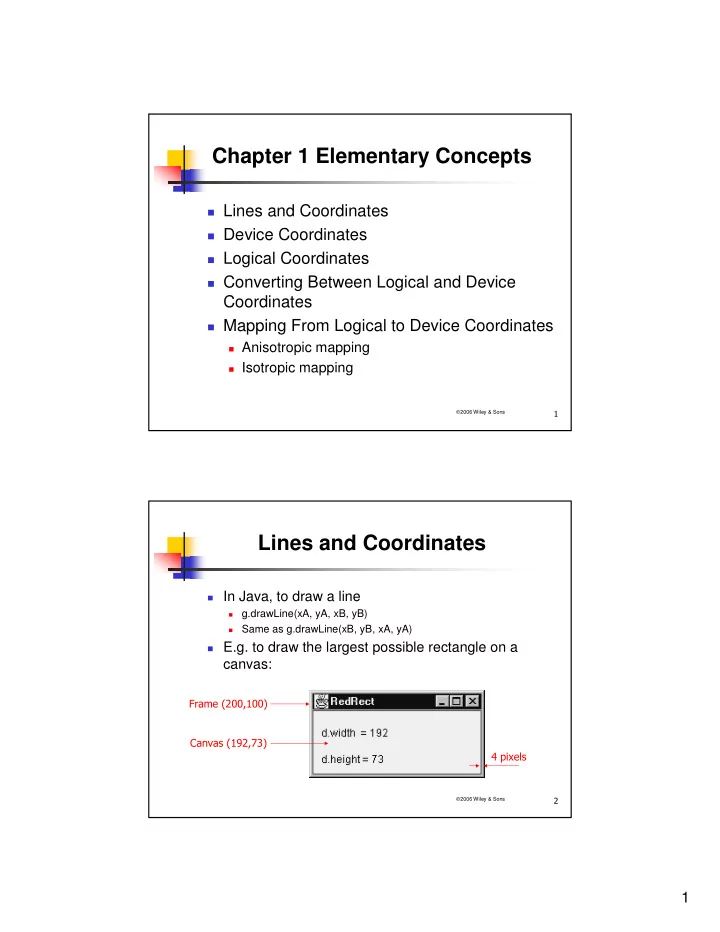
In Java, to draw a line
- g.drawLine(xA, yA, xB, yB)
- Same as g.drawLine(xB, yB, xA, yA)
E.g. to draw the largest possible rectangle on a