
SLIDE 1
Slides adapted with thanks from: Dr. Marie desJardin
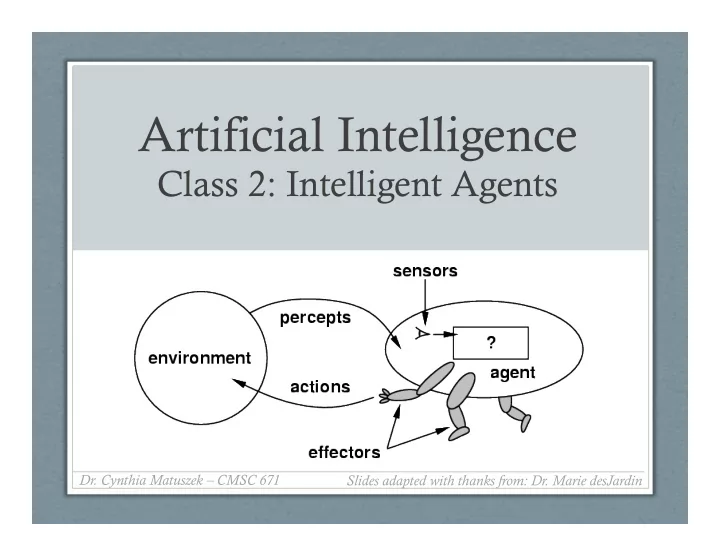
Artificial Intelligence
Class 2: Intelligent Agents
- Dr. Cynthia Matuszek – CMSC 671
Bookkeeping Due last night: Introduction survey If you havent - - PowerPoint PPT Presentation
Artificial Intelligence Class 2: Intelligent Agents Dr. Cynthia Matuszek CMSC 671 Slides adapted with thanks from: Dr. Marie desJardin Bookkeeping Due last night: Introduction survey If you havent Academic integrity done
Slides adapted with thanks from: Dr. Marie desJardin
2
If you haven’t done these, do!
3
use to characterize different problem spaces?
4
environment
via the environment
5
(olfaction), neuromuscular system (proprioception), …
…), auditory streams (pitch, loudness, direction), …
6
(olfaction), neuromuscular system (proprioception), …
…), auditory streams (pitch, loudness, direction), …
7
to be carefully defined
levels of abstraction!
input, microphone, GPS, …
customers, …
agent programs!
8
action(s) that maximize its expected performance
resources required, effect on environment, constraints met, user satisfaction, …
9
priori decisions
10
11
12
13
15
16
17
19
20
21
22
the environment, the environment is fully observable
23
unpredictable outcomes.
need not deal with uncertainty.
24
depend on what actions occurred in previous episodes.
connected episodes.
25
environment is discrete, otherwise it is continuous.
needs to be concerned about strategic, game-theoretic aspects of the environment (for either cooperative or competitive agents)
properties, whereas most social and economic systems get their complexity from the interactions of (more or less) rational agents.
26
Fully
Deterministic? Episodic? Static? Discrete? Single agent?
Solitaire Backgammon Taxi driving Internet shopping Medical diagnosis
27
Fully
Deterministic? Episodic? Static? Discrete? Single agent?
Solitaire No Yes Yes Yes Yes Yes Backgammon Taxi driving Internet shopping Medical diagnosis
28
Fully
Deterministic? Episodic? Static? Discrete? Single agent?
Solitaire No Yes Yes Yes Yes Yes Backgammon Yes No No Yes Yes No Taxi driving Internet shopping Medical diagnosis
29
Fully
Deterministic? Episodic? Static? Discrete? Single agent?
Solitaire No Yes Yes Yes Yes Yes Backgammon Yes No No Yes Yes No Taxi driving No No No No No No Internet shopping Medical diagnosis
30
Fully
Deterministic? Episodic? Static? Discrete? Single agent?
Solitaire No Yes Yes Yes Yes Yes Backgammon Yes No No Yes Yes No Taxi driving No No No No No No Internet shopping No No No No Yes No Medical diagnosis
31
Fully
Deterministic? Episodic? Static? Discrete? Single agent?
Solitaire No Yes Yes Yes Yes Yes Backgammon Yes No No Yes Yes No Taxi driving No No No No No No Internet shopping No No No No Yes No Medical diagnosis No No No No No Yes
32
Fully
Deterministic? Episodic? Static? Discrete? Single agent?
Solitaire No Yes Yes Yes Yes Yes Backgammon Yes No No Yes Yes No Taxi driving No No No No No No Internet shopping No No No No Yes No Medical diagnosis No No No No No Yes
33
→ Lots of (most?) real-world domains fall into the hardest case! ←
34
35