
SLIDE 1
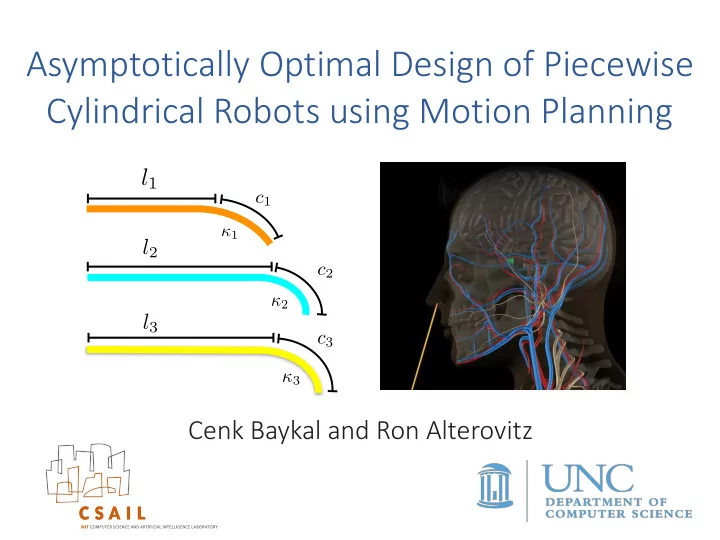
Asymptotically Optimal Design of Piecewise Cylindrical Robots using Motion Planning
Cenk Baykal and Ron Alterovitz
l2
c3
c2 c1
κ1
κ2 κ3
Asymptotically Optimal Design of Piecewise Cylindrical Robots using - - PowerPoint PPT Presentation
Asymptotically Optimal Design of Piecewise Cylindrical Robots using Motion Planning c 1 1 l 2 c 2 2 c 3 3 Cenk Baykal and Ron Alterovitz Lung Cancer: The Deadliest Cancer in the US Early stage diagnosis is critical, and requires
l2
c3
c2 c1
κ1
κ2 κ3
Early stage diagnosis is critical, and requires biopsy Concentric tube robots can avoid obstacles and perform safe biopsies Patient-specific robot design necessary for reaching clinical targets
Start
Start
[Gilbert 2016]
l4
l2
l2
c3 c2
c1
κ1 κ2 κ3
Goal
c1
κ1
l2
c2
κ2 c3 κ3
c1
κ1
l2
c2
κ2 c3 κ3
Evaluating reachability under a design
Evaluating reachability under a design
Ha et al. (2014) Burgner et al. (2016) Torres et al. (2012) Bergeles et al. (2015) Denarie et al. (2016) Ha et al. (2017)
Sampling Designs for Evaluation
an optimal design
Annealing (ASA) Evaluating Reachability
Trees (RRT)
RRT: S. M. LaValle, Planning Algorithms, 2006 ASA: L. Ingber, Very fast simulated re-annealing, 1989 Video: S. Karaman (youtube.com/user/skaramanmovie)
Cannot accurately evaluate (with certainty) a sampled design in finite time Easy-to-implement Idea:
Cannot accurately evaluate (with certainty) a sampled design in finite time Easy-to-implement Idea:
See paper for formal proof
l4 l2
blood vessels, bronchial tubes
l2
c3
c2
c1
κ1
κ2 κ3
l2
c3
c2 c1
κ1
κ2 κ3