
SLIDE 1
Learning From Data Lecture 4 Real Learning is Feasible
Real Learning vs. Verification The Two Step Solution to Learning Closer to Reality: Error and Noise
- M. Magdon-Ismail
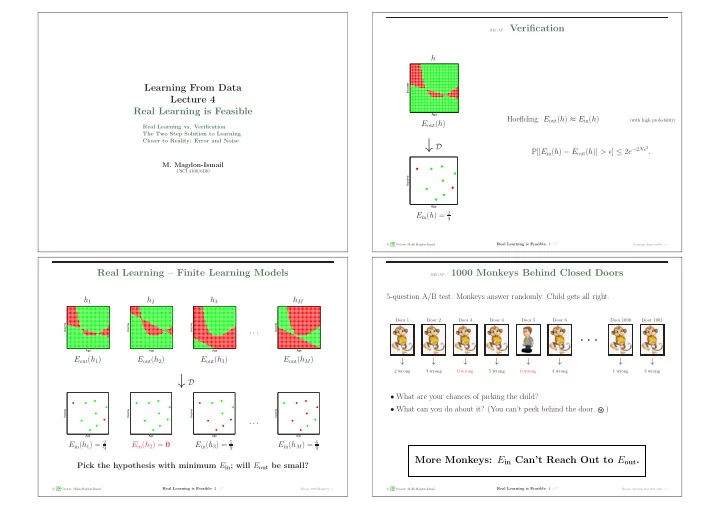
CSCI 4100/6100 recap: Verification
h
Age Income
Eout(h)
↓ D
Age Income
Ein(h) = 2
9
Hoeffding: Eout(h) ≈ Ein(h)
(with high probability)
P[|Ein(h) − Eout(h)| > ǫ] ≤ 2e−2Nǫ2.
c A M L Creator: Malik Magdon-Ismail
Real Learning is Feasible: 2 /17
Learning: finite model − →
Real Learning – Finite Learning Models
h1
Age Income
Eout(h1) h2
Age Income
Eout(h2) h3
Age Income
Eout(h3) · · · hM
Age Income
Eout(hM)
↓ D
Age Income
Ein(h1) = 2
9
Age Income
Ein(h2) = 0
Age Income
Ein(h3) = 5
9
· · ·
Age Income
Ein(hM) = 6
9
Pick the hypothesis with minimum Ein; will Eout be small?
c A M L Creator: Malik Magdon-Ismail
Real Learning is Feasible: 3 /17
Recap: 1000 Monkeys− →
recap: 1000 Monkeys Behind Closed Doors
5-question A/B test. Monkeys answer randomly. Child gets all right.
Door 1 Door 2 Door 3 Door 4 Door 5 Door 6 Door 1000 Door 1001
· · ·
↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓
2 wrong 3 wrong 0 wrong 5 wrong 0 wrong 4 wrong 1 wrong 3 wrong
- What are your chances of picking the child?
- What can you do about it? (You can’t peek behind the door.
)
More Monkeys: Ein Can’t Reach Out to Eout.
c A M L Creator: Malik Magdon-Ismail
Real Learning is Feasible: 4 /17
Recap: selection bias and coins − →