
SLIDE 1
1
Administrative Issues
Login into learn usc edu and make sure
Login into learn.usc.edu and make sure
that CSCI561a is listed as one of your courses.
Web page: Web page:
http://www-scf.usc.edu/~ csci561b/ http://den.usc.edu
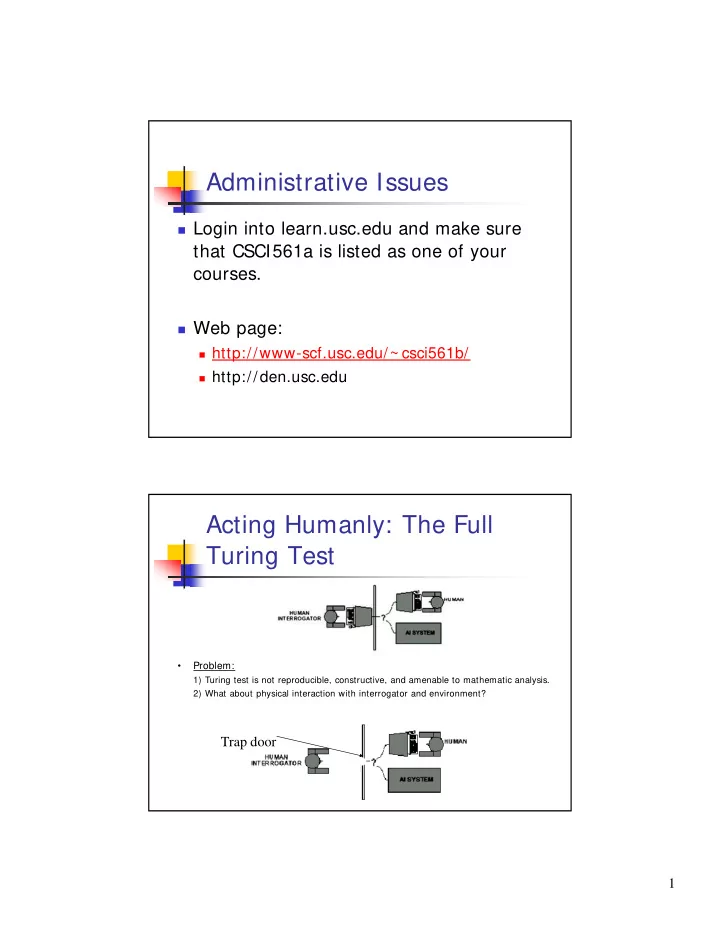
Acting Humanly: The Full Turing Test
- Problem:
1) Turing test is not reproducible, constructive, and amenable to mathematic analysis. 2) What about physical interaction with interrogator and environment?