
SLIDE 1
Practical Problems in VLSI Physical Design A-tree Algorithm (1/13)
A-tree Routing Algorithm
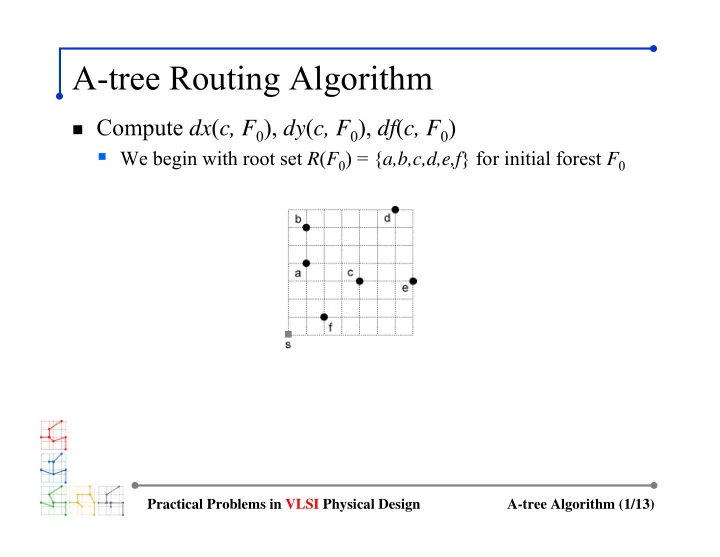
Compute dx(c, F0), dy(c, F0), df(c, F0)
A-tree Routing Algorithm Compute dx ( c, F 0 ), dy ( c, F 0 ), df ( - - PowerPoint PPT Presentation
A-tree Routing Algorithm Compute dx ( c, F 0 ), dy ( c, F 0 ), df ( c, F 0 ) We begin with root set R ( F 0 ) = { a,b,c,d,e,f } for initial forest F 0 Practical Problems in VLSI Physical Design A-tree Algorithm (1/13) Recall that mx =
Practical Problems in VLSI Physical Design A-tree Algorithm (1/13)
Compute dx(c, F0), dy(c, F0), df(c, F0)
Practical Problems in VLSI Physical Design A-tree Algorithm (2/13)
Practical Problems in VLSI Physical Design A-tree Algorithm (3/13)
Practical Problems in VLSI Physical Design A-tree Algorithm (4/13)
Practical Problems in VLSI Physical Design A-tree Algorithm (5/13)
Compute dx/dy/df for all other nodes
Practical Problems in VLSI Physical Design A-tree Algorithm (6/13)
What kind of safe moves does node a contain?
Practical Problems in VLSI Physical Design A-tree Algorithm (7/13)
Compute safe moves for all nodes in F0
Practical Problems in VLSI Physical Design A-tree Algorithm (8/13)
Practical Problems in VLSI Physical Design A-tree Algorithm (9/13)
Practical Problems in VLSI Physical Design A-tree Algorithm (10/13)
Perform safe move for node a (type 2)
Practical Problems in VLSI Physical Design A-tree Algorithm (11/13)
Updating dx/dy/df values and safe moves
Practical Problems in VLSI Physical Design A-tree Algorithm (12/13)
Choose the nodes in alphabetical order
Practical Problems in VLSI Physical Design A-tree Algorithm (13/13)
Final rectilinear Steiner arborescence