
SLIDE 1
A Bayesian Approach to Lagrangian Data Assimilation
Chris Jones, UNC‐CH and University of Warwick Andrew Stuart, Jochen Voss, University of Warwick Amit Apte, TIFR Bangalore Supported by the Office of Naval Research and the National Science Foundation
f f f 1 1 2 1 1
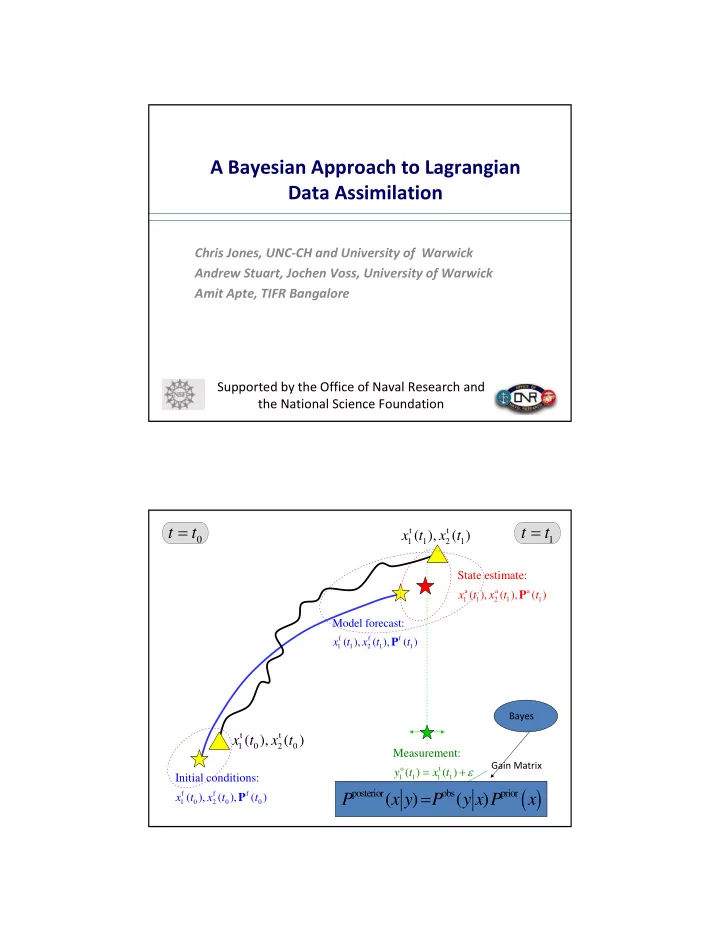
Model forecast: ( ), ( ), ( ) x t x t t P
t t 1 1 2 1
( ), ( ) x t x t
t t =
t t 1 2
( ), ( ) x t x t
f f f 1 2
Initial conditions: ( ), ( ), ( ) x t x t t P
1
t t =
- t
1 1 1 1
Measurement: ( ) ( ) y t x t ε = +
a a a 1 1 2 1 1
State estimate: ( ), ( ), ( ) x t x t t P
Gain Matrix
( )
posterior
- bs
prior
( ) ( ) P x y P y x P x =
Bayes