
SLIDE 1
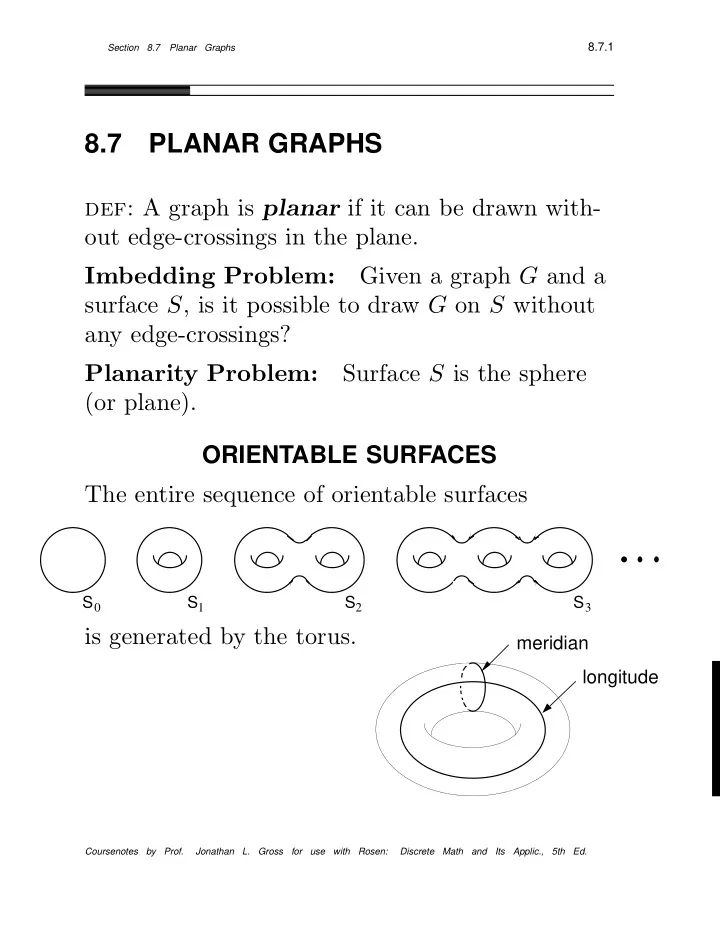
S0 S1 S2 S3
meridian longitude
Section 8.7 Planar Graphs
8.7.1
8.7 PLANAR GRAPHS
def: A graph is planar if it can be drawn with-
- ut edge-crossings in the plane.
Imbedding Problem: Given a graph G and a surface S, is it possible to draw G on S without any edge-crossings? Planarity Problem: Surface S is the sphere (or plane). ORIENTABLE SURFACES The entire sequence of orientable surfaces is generated by the torus.
Coursenotes by Prof. Jonathan L. Gross for use with Rosen: Discrete Math and Its Applic., 5th Ed.