
1
Chapter 5: I/O Systems
Chapter 5 2 CS 1550, cs.pitt.edu (originaly modified by Ethan L. Miller and Scott A. Brandt)Input/Output
Principles of I/O hardware Principles of I/O software I/O software layers Disks Clocks Character-oriented terminals Graphical user interfaces Network terminals Power management
Chapter 5 3 CS 1550, cs.pitt.edu (originaly modified by Ethan L. Miller and Scott A. Brandt)How fast is I/O hardware?
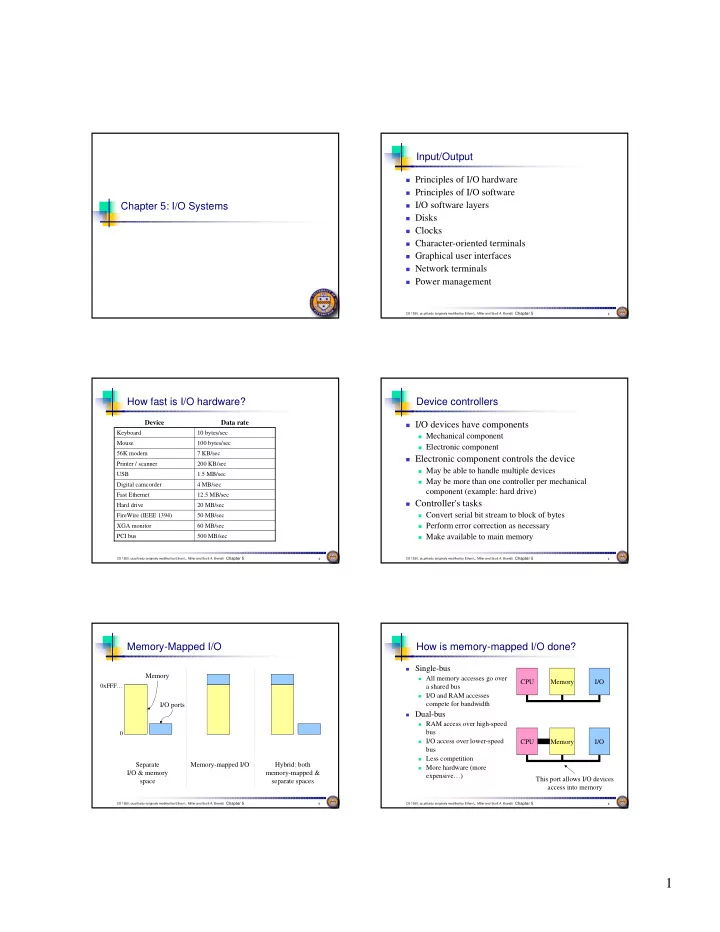
4 MB/sec Digital camcorder 500 MB/sec PCI bus 60 MB/sec XGA monitor 50 MB/sec FireWire (IEEE 1394) 20 MB/sec Hard drive 12.5 MB/sec Fast Ethernet 1.5 MB/sec USB 200 KB/sec Printer / scanner 7 KB/sec 56K modem 100 bytes/sec Mouse 10 bytes/sec Keyboard
Data rate Device
Chapter 5 4 CS 1550, cs.pitt.edu (originaly modified by Ethan L. Miller and Scott A. Brandt)Device controllers
I/O devices have components
Mechanical component Electronic component
Electronic component controls the device
May be able to handle multiple devices May be more than one controller per mechanical
component (example: hard drive)
Controller's tasks
Convert serial bit stream to block of bytes Perform error correction as necessary Make available to main memory
Chapter 5 5 CS 1550, cs.pitt.edu (originaly modified by Ethan L. Miller and Scott A. Brandt)Memory-Mapped I/O
Separate I/O & memory space
0xFFF…
Memory I/O ports Memory-mapped I/O Hybrid: both memory-mapped & separate spaces
Chapter 5 6 CS 1550, cs.pitt.edu (originaly modified by Ethan L. Miller and Scott A. Brandt)How is memory-mapped I/O done?
Single-bus
All memory accesses go overa shared bus
I/O and RAM accessescompete for bandwidth
Dual-bus
RAM access over high-speedbus
I/O access over lower-speedbus
Less competition More hardware (moreexpensive…) CPU Memory I/O CPU Memory I/O This port allows I/O devices access into memory