
SLIDE 1
Interpolation versus Extrapolation
- Interpolation is technically defined only for inputs that are within
the range of the data set mini xi ≤ x ≤ maxi xi
- If an input is outside of this range, the model is said to be
extrapolating
- A good model should do reasonable things for both cases
- Extrapolation is much a harder problem
- J. McNames
Portland State University ECE 4/557 Univariate Smoothing
- Ver. 1.25
3
Univariate Smoothing Overview
- Problem definition
- Interpolation
- Polynomial smoothing
- Cubic splines
- Basis splines
- Smoothing splines
- Bayes’ rule
- Density estimation
- Kernel smoothing
- Local averaging
- Weighted least squares
- Local linear models
- Prediction error estimates
- J. McNames
Portland State University ECE 4/557 Univariate Smoothing
- Ver. 1.25
1
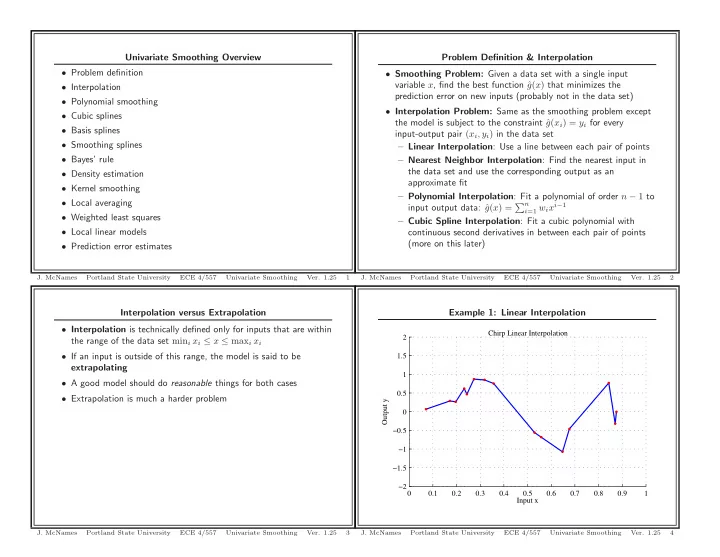
Example 1: Linear Interpolation
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 −2 −1.5 −1 −0.5 0.5 1 1.5 2 Input x Output y Chirp Linear Interpolation
- J. McNames
Portland State University ECE 4/557 Univariate Smoothing
- Ver. 1.25
4
Problem Definition & Interpolation
- Smoothing Problem: Given a data set with a single input
variable x, find the best function ˆ g(x) that minimizes the prediction error on new inputs (probably not in the data set)
- Interpolation Problem: Same as the smoothing problem except
the model is subject to the constraint ˆ g(xi) = yi for every input-output pair (xi, yi) in the data set – Linear Interpolation: Use a line between each pair of points – Nearest Neighbor Interpolation: Find the nearest input in the data set and use the corresponding output as an approximate fit – Polynomial Interpolation: Fit a polynomial of order n − 1 to input output data: ˆ g(x) = n
i=1 wixi−1
– Cubic Spline Interpolation: Fit a cubic polynomial with continuous second derivatives in between each pair of points (more on this later)
- J. McNames
Portland State University ECE 4/557 Univariate Smoothing
- Ver. 1.25