
SLIDE 1
Time Series Models and its Relevance to Modeling TCP SYN based DoS attacks
Cyriac James, Hema A. Murthy
Department of Computer Science & Engineering Indian Institute of Technology Madras, India
June 23, 2011
Cyriac James, Hema A. Murthy (IITM) June 23, 2011 1 / 35
Background: TCP SYN Attack
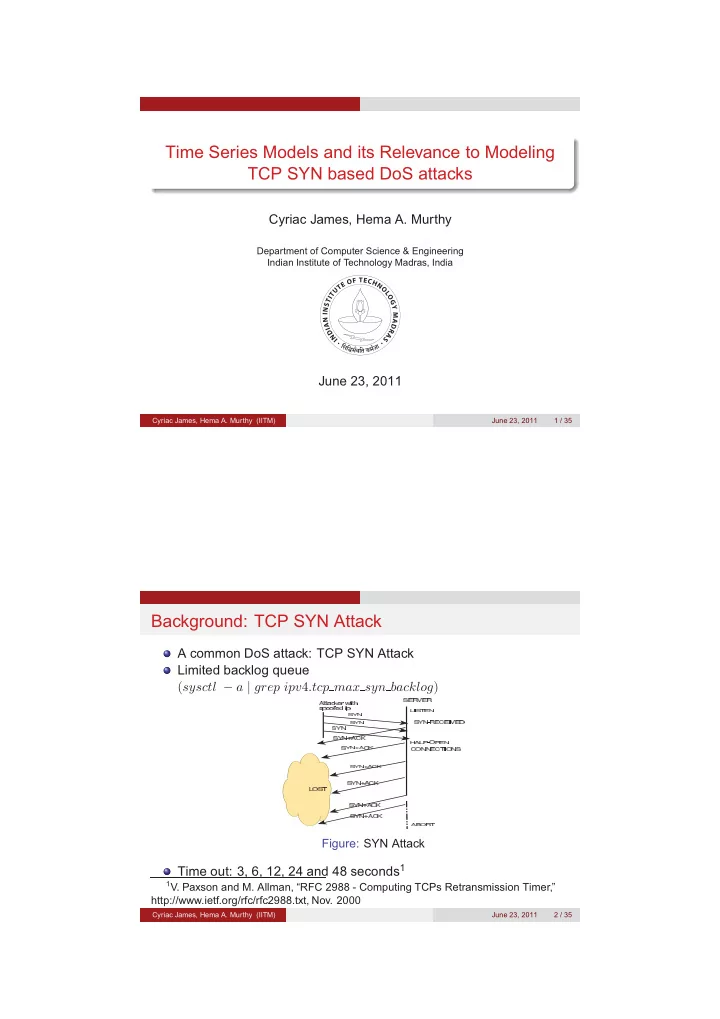
A common DoS attack: TCP SYN Attack Limited backlog queue (sysctl − a | grep ipv4.tcp max syn backlog)
Figure: SYN Attack
Time out: 3, 6, 12, 24 and 48 seconds1
- 1V. Paxson and M. Allman, “RFC 2988 - Computing TCPs Retransmission Timer,”
http://www.ietf.org/rfc/rfc2988.txt, Nov. 2000
Cyriac James, Hema A. Murthy (IITM) June 23, 2011 2 / 35