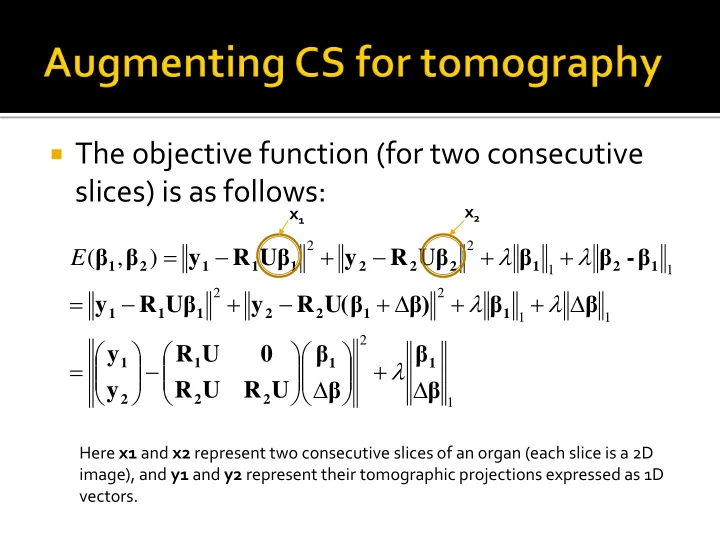
SLIDE 1 The objective function (for two consecutive
slices) is as follows:
1 2 1 1 2 2 1 1 2 2
) , ( β β β β U R U R U R y y β β β) U(β R y Uβ R y β
β Uβ R y Uβ R y β β
1 1 2 2 1 2 1 1 1 2 2 1 1 1 1 2 1 2 2 2 1 1 1 2 1
E
x1 x2 Here x1 and x2 represent two consecutive slices of an organ (each slice is a 2D image), and y1 and y2 represent their tomographic projections expressed as 1D vectors.
SLIDE 2
SLIDE 3
The previous algorithms for tomographic
reconstruction assumed that the angles of Radon projection were accurately known.
In certain applications, this assumption is
surprisingly invalid.
This is called as “tomography under unknown
angles”.
SLIDE 4
Application 1: Patient motion during CT
scanning
Application 2: Moving insect tomography Application 3: Cryo-electron tomography
SLIDE 5
Application 3: Cryo-electron tomography In this, one collects multiple (nearly) identical
samples of a structure (such as a virus) which we wish to image.
Each slide contains thousands of virus particles
(i.e. samples) packed in a substrate such as ice.
A tomographic projection is obtained by passing
an electron-ray beam through all particles, through some angle.
SLIDE 6
The electron beam usually destroys the sample, and hence
another tomographic projection of a different sample (containing virus particles of the same type) is acquired.
The problem is that each virus particle will be oriented
randomly, and all the orientations are unknown!
To make matters worse, the low power of the electron
beam produces measurements that are extremely noisy.
In such applications, however several hundred or even
thousand projections (all under unknown angles) are acquired.
SLIDE 7 https://en.wikipedia.org/wiki/Cryogenic_electron_ microscopy
SLIDE 8 Ajit Rajwade
https://med.nyu.edu/skirball
SLIDE 9 Ajit Rajwade
https://ki.se/en/research/core-facility-for-electron-tomography-0
SLIDE 10 Particle picking from noisy micrographs In some algorithms, similar particles are
clustered and averaged to reduce noise
Given the series of particle images, we then
seek to solve jointly for the angles of projection and the underlying structure
Ajit Rajwade
SLIDE 11 Nobel in Chemistry in 2017 More details here below:
https://www.nobelprize.org/nobel_prizes/chemistry/laureates/ 2017/advanced-chemistryprize2017.pdf
Ajit Rajwade
SLIDE 12
Moment-based approach Ordering-based approach Approach using dimensionality reduction
(similar to ordering-based approach).
SLIDE 13
SLIDE 14
We shall restrict ourselves to 2D images and
1D tomographic projections although the theory is extensible to 3D images (and their 2D projections)
The moment of order (p,q) of an image f(x,y)
is defined as follows:
SLIDE 15
The moment of order (p,q) where k=p+q of an
image f(x,y) is defined as follows:
Note that there can exist multiple pairs of
(p,q) which sum up to k, and these are all called order k image moments.
SLIDE 16
The order n moment of a tomographic
projection at angle θ is defined as follows:
Substituting the definition of Pθ(s) into Mθ(n):
SLIDE 17
Using the binomial theorem, we have: We will use this to derive a neat relationship
between the tomographic projection moments and the image moments!
See next slide.
SLIDE 18 Image moment of order (n-l,l)
SLIDE 19 Substituting n = 0, with measurements at one angle. Substituting n = 1, with measurements at two angles.
SLIDE 20 Substituting n = k, with measurements at k+1 different angles.
SLIDE 21 These equations are called the Helgason- Ludwig consistency conditions (HLCC), and they give relations between image and projection moments. One can prove that the matrix A is invertible if and only if the projections are acquired at k+1 distinct angles. In fact, unique k+1 angles are necessary and sufficient for estimation of the image moments of order 0 through to order k.
SLIDE 22 In the tomography under unknown angles
problem, we would know neither the image moments nor the angles of acquisition.
In such a case, the underlying image can be
- btained only up to an unknown rotation.
To understand why, see the next slide.
SLIDE 23 θ1 θ2 θ3 In the first case you took projections of an object at three angles θ1, θ2, θ3 +θ1 + θ2 + θ3 In the second case you took projections of a version of the same
- bject but rotated by at three
angles +θ1, +θ2, +θ3 In both cases, the projections will be identical! The parameter will always be indeterminate – but this is not a problem in most applications
SLIDE 24 Image source: Malhotra and Rajwade, “Tomographic reconstruction with unknown view angles exploiting moment-based relationships”
https://www.cse.iitb.ac.i n/~ajitvr/eeshan_icip201 6.pdf
SLIDE 25 Given tomographic projections of a 2D image in 8 or more
distinct and unknown angles, the image moments of order 1 and 2, as well as the angles can be uniquely recovered – but up to the aforementioned rotation ambiguity.
This result is true for almost any 2D image (i.e. barring a set of
very rare “corner case” images).
This result was proved in 2000 by Basu and Bresler at UIUC in a
classic paper called “Uniqueness of tomography with unknown view angles”.
In an accompanying paper called “Feasibility of tomography
with unknown view angles”, they also proved that these estimates are stable under noise.
The proof of the theorem and the discussion of the corner cases
is outside the scope of our course.
SLIDE 26 In other words, systems of equations of the
following form have a unique solution in the angles and the image moments, but modulo the rotation ambiguity:
n n l l n i l n l i l n n
IM A M l n C PM
i i
) ( , ) (
sin cos ) , (
Image moments Projection moments Column vector of image moments of
This is the n-th row of a matrix and it represents the linear combination coefficients for moments of
SLIDE 27 We can now build an algorithm for the
aforementioned problem.
Minimize the following objective function in
an alternating fashion:
Start with a random initial angle estimate and
compute the image moments by matrix inversion.
N n Q i n n n Q i i
IM A PM IM E
i i
1 2 ) ( ) ( 1)
} { , (
SLIDE 28
Next, do an independent brute force search over
each angle θi. * For every value of θi sampled from 0 to 180, determine the image moments using that value, and hence determine the value of E. * Choose the value of θi corresponding to the least value of E.
Perform a multi-start strategy for the best
possible results – since this cost function is highly nonconvex.
SLIDE 29 Remember: these angles can be estimated
- nly up to a global angular offset which is
indeterminate.
Following the angle estimates, the underlying
image can be reconstructed using FBP.