
Statistical Natural Language Processing
Artifjcial Neural networks & deep learning Çağrı Çöltekin
University of Tübingen Seminar für Sprachwissenschaft
Summer Semester 2018
Preliminaries ANNs Deep ANNs CNNs RNNs Autoencoders
Artifjcial neural networks
- Artifjcial neural networks (ANNs) are machine learning
models inspired by biological neural networks
- ANNs are powerful non-linear models
- Power comes with a price: there are no guarantees of
fjnding a global minimum of the error function
- ANNs have been used in ML, AI, Cognitive science since
1950’s – with some ups and downs
- Currently they are the driving force behind the popular
‘deep learning’ methods
Ç. Çöltekin, SfS / University of Tübingen Summer Semester 2018 1 / 72 Preliminaries ANNs Deep ANNs CNNs RNNs Autoencoders
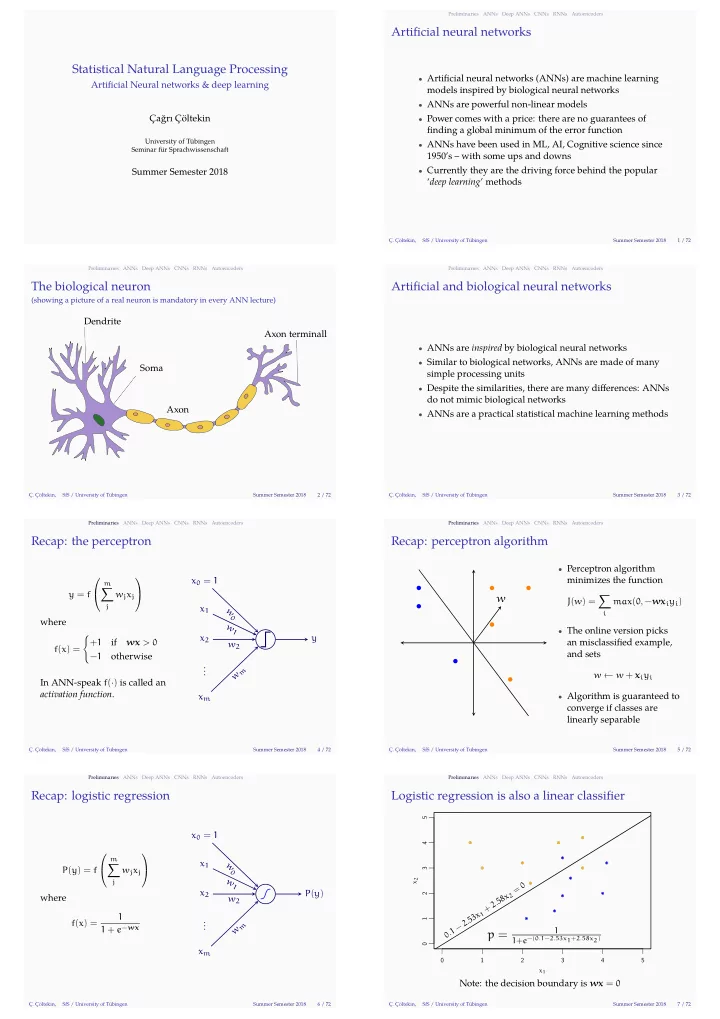
The biological neuron
(showing a picture of a real neuron is mandatory in every ANN lecture)
Dendrite Soma Axon Axon terminall
Ç. Çöltekin, SfS / University of Tübingen Summer Semester 2018 2 / 72 Preliminaries ANNs Deep ANNs CNNs RNNs Autoencoders
Artifjcial and biological neural networks
- ANNs are inspired by biological neural networks
- Similar to biological networks, ANNs are made of many
simple processing units
- Despite the similarities, there are many difgerences: ANNs
do not mimic biological networks
- ANNs are a practical statistical machine learning methods
Ç. Çöltekin, SfS / University of Tübingen Summer Semester 2018 3 / 72 Preliminaries ANNs Deep ANNs CNNs RNNs Autoencoders
Recap: the perceptron
y = f
m
∑
j
wjxj where f(x) = { +1 if wx > 0 −1
- therwise
In ANN-speak f(·) is called an activation function. x2 x1 . . . xm w
1
w2 wm y x0 = 1 w0
Ç. Çöltekin, SfS / University of Tübingen Summer Semester 2018 4 / 72 Preliminaries ANNs Deep ANNs CNNs RNNs Autoencoders
Recap: perceptron algorithm
w
- Perceptron algorithm
minimizes the function J(w) = ∑
i
max(0, −wxiyi)
- The online version picks
an misclassifjed example, and sets w ← w + xiyi
- Algorithm is guaranteed to
converge if classes are linearly separable
Ç. Çöltekin, SfS / University of Tübingen Summer Semester 2018 5 / 72 Preliminaries ANNs Deep ANNs CNNs RNNs Autoencoders
Recap: logistic regression
P(y) = f
m
∑
j
wjxj where f(x) = 1 1 + e−wx x2 x1 . . . xm w
1
w2 wm P(y) x0 = 1 w0
Ç. Çöltekin, SfS / University of Tübingen Summer Semester 2018 6 / 72 Preliminaries ANNs Deep ANNs CNNs RNNs Autoencoders
Logistic regression is also a linear classifjer
1 2 3 4 5 1 2 3 4 5 x1 x2
. 1 − 2 . 5 3 x
1
+ 2 . 5 8 x
2
=
p =
1 1+e−(0.1−2.53x1+2.58x2)
Note: the decision boundary is wx = 0
Ç. Çöltekin, SfS / University of Tübingen Summer Semester 2018 7 / 72