
SLIDE 1
S
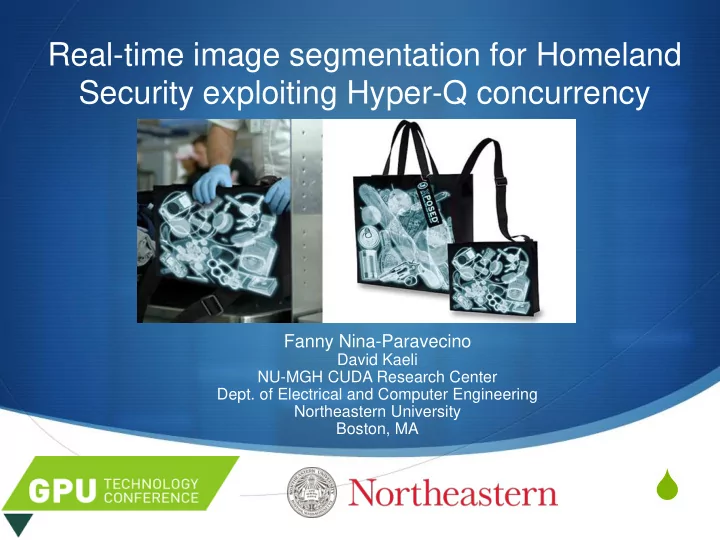
Real-time image segmentation for Homeland Security exploiting Hyper-Q concurrency
Fanny Nina-Paravecino
David Kaeli NU-MGH CUDA Research Center
- Dept. of Electrical and Computer Engineering
Northeastern University Boston, MA