
SLIDE 1
Regression Diagnostics and the Forward Search 1
- A. C. Atkinson, London School of Economics
February 23 2009
The first section introduces the ideas of regression diagnostics for check- ing regression models and shows how deletion diagnostics may fail in the presence of several similar outliers. Section 2 describes the forward search for regression models and illustrates several of its properties.
1 Regression Diagnostics
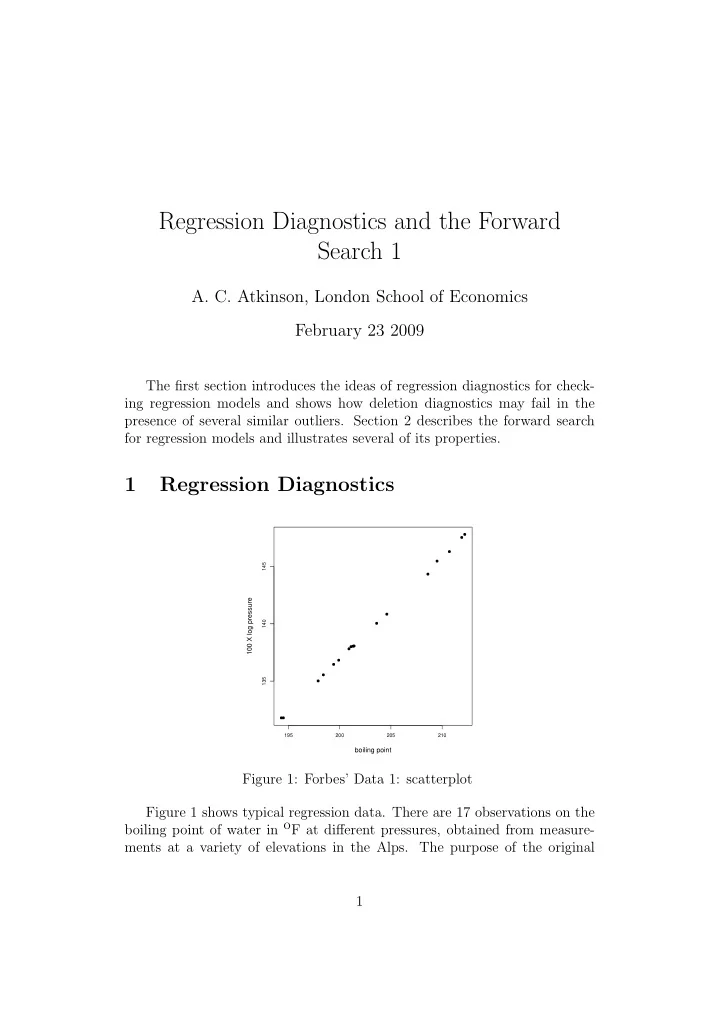
195 200 205 210 135 140 145
boiling point 100 X log pressure