
SLIDE 1
Recapitulation: Expected Measurements
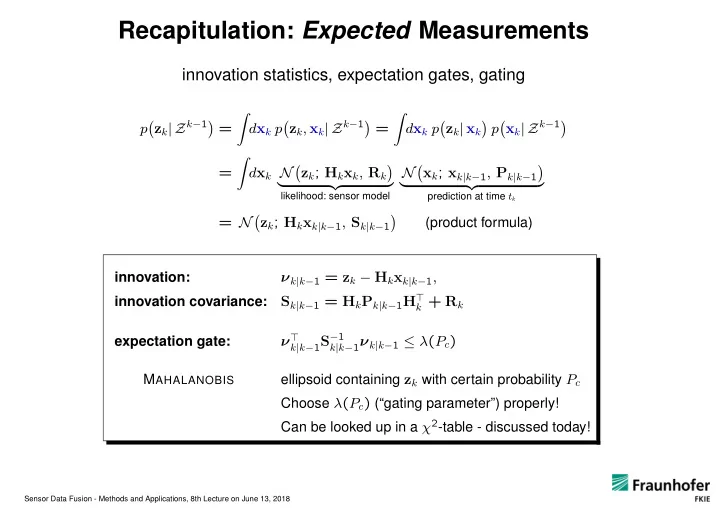
innovation statistics, expectation gates, gating
pzk| Zk1 =
Z
dxk pzk, xk| Zk1 =
Z
dxk pzk| xk
- pxk| Zk1
=
Z
dxk N
- zk; Hkxk, Rk
- |
{z }
likelihood: sensor model
N
- xk; xk|k1, Pk|k1
- |
{z }
prediction at time tk
= N
- zk; Hkxk|k1, Sk|k1
- (product formula)
innovation:
νk|k1 = zk Hkxk|k1,
innovation covariance:
Sk|k1 = HkPk|k1H>
k + Rk
expectation gate:
ν>
k|k1S1 k|k1νk|k1 (Pc)
MAHALANOBIS ellipsoid containing zk with certain probability Pc Choose (Pc) (“gating parameter”) properly! Can be looked up in a 2-table - discussed today!
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018