
SLIDE 1
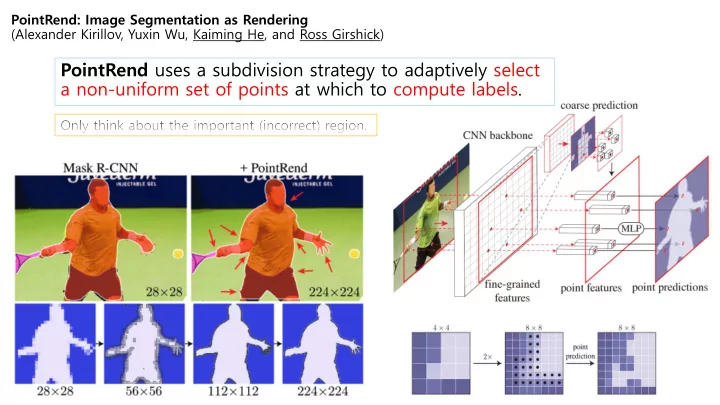
PointRend: Image Segmentation as Rendering (Alexander Kirillov, Yuxin Wu, Kaiming He, and Ross Girshick)
PointRend uses a subdivision strategy to adaptively select a - - PowerPoint PPT Presentation
PointRend: Image Segmentation as Rendering (Alexander Kirillov, Yuxin Wu, Kaiming He, and Ross Girshick) PointRend uses a subdivision strategy to adaptively select a non-uniform set of points at which to compute labels. ELF: Embedded Localization
PointRend: Image Segmentation as Rendering (Alexander Kirillov, Yuxin Wu, Kaiming He, and Ross Girshick)
Benbihi, Assia and Geist, Matthieu and Pradalier ICCV 2019
requirement1
requirement2
Reference:Hands-on Machine Learning with Scikit-Learn, Keras, and TensorFlow, 2nd ed., O'Reilly, 2019 https ://towardsdatascience.com/a-comprehensive-guide-to-convolutional-neural-networks-the-eli5-way-3bd2b1164a53
Feature map
http://research.sualab.com/assets/images/interpretable- machine-learning-overview-2/saliency-map-with- gradient-concept.png
Image Feature Map Saliency Map
and image space
e gradient to all the pixels in the image. Apply the correlation to the features specifically and generate a visualization in image space .
High level representation Low level representation
Low High Low High Middle
This paper focus on these parts