
SLIDE 1
9/3/2009 1
Nearest Neighbor Queries
Ling Hu lingh@usc.edu Nick Roussopoulos, Stephen Kelly and Frédéric Vincent
Outline
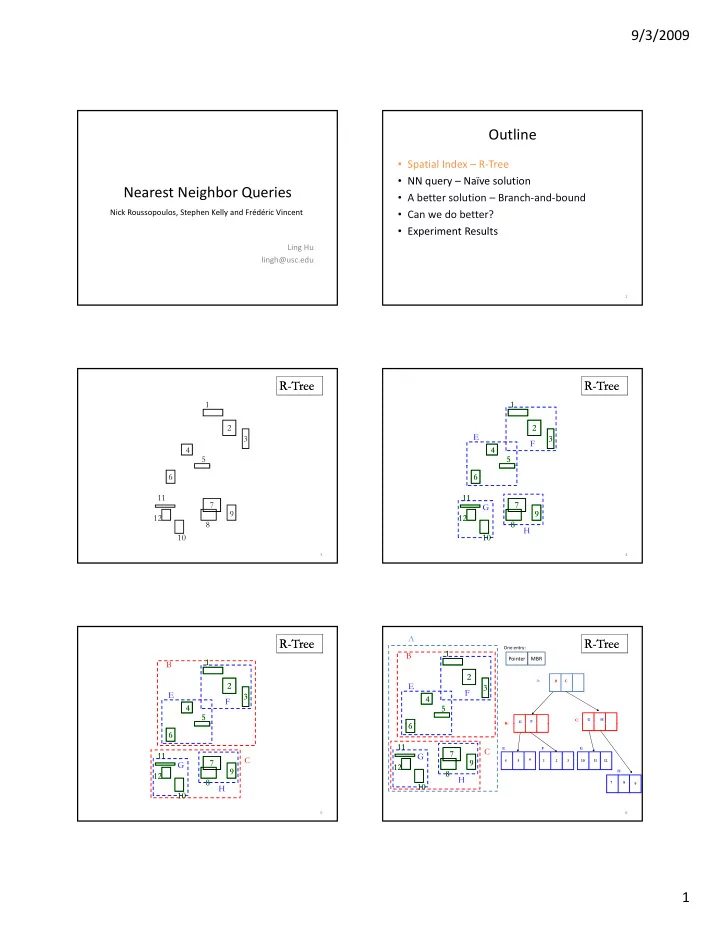
- Spatial Index – R‐Tree
- NN query – Naïve solution
- A better solution – Branch‐and‐bound
- Can we do better?
- Experiment Results
2
2 3 1 4 5
R-
- Tree
Tree
6 7 8 9 10 11 12
3
2 3 1 4 5
R-
- Tree
Tree
E F 2 3 1 4 5 6 7 8 9 10 11 12 G H
4
6 7 8 9 10 11 12 2 3 1 4 5 E F
R-
- Tree
Tree
B 2 3 1 4 5 6 7 8 9 10 11 12 C G H
5
6 7 8 9 10 11 12 6 2 3 1 4 5 A B E F
R-
- Tree
Tree
B C E F G H A: B: C:
Pointer MBR
One entry:
6 2 3 1 4 5 6 7 8 9 10 11 12 C G H
B: 4 5 6 1 2 3 10 11 12 7 8 9 E F G H 6