
SLIDE 1
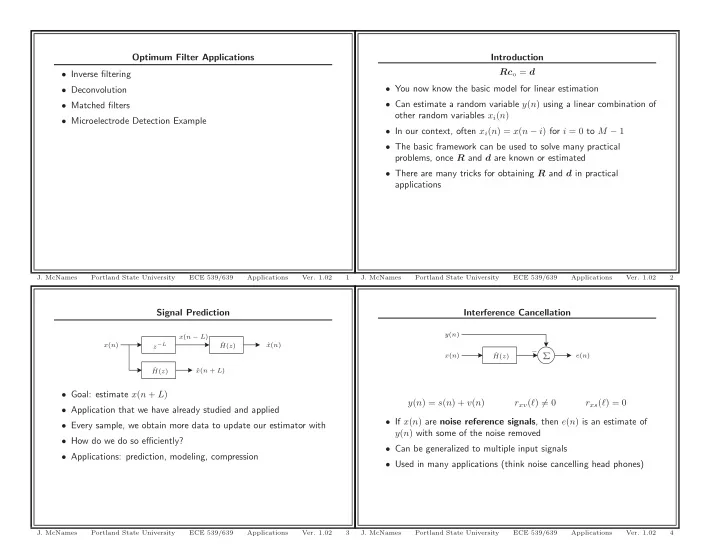
Signal Prediction
x(n) x(n − L) ˆ x(n + L) ˆ x(n) z−L ˆ H(z) ˆ H(z)
- Goal: estimate x(n + L)
- Application that we have already studied and applied
- Every sample, we obtain more data to update our estimator with
- How do we do so efficiently?
- Applications: prediction, modeling, compression
- J. McNames
Portland State University ECE 539/639 Applications
- Ver. 1.02
3
Optimum Filter Applications
- Inverse filtering
- Deconvolution
- Matched filters
- Microelectrode Detection Example
- J. McNames
Portland State University ECE 539/639 Applications
- Ver. 1.02
1
Interference Cancellation
- −
y(n) x(n) e(n) ˆ H(z)
y(n) = s(n) + v(n) rxv(ℓ) = 0 rxs(ℓ) = 0
- If x(n) are noise reference signals, then e(n) is an estimate of
y(n) with some of the noise removed
- Can be generalized to multiple input signals
- Used in many applications (think noise cancelling head phones)
- J. McNames
Portland State University ECE 539/639 Applications
- Ver. 1.02
4
Introduction Rco = d
- You now know the basic model for linear estimation
- Can estimate a random variable y(n) using a linear combination of
- ther random variables xi(n)
- In our context, often xi(n) = x(n − i) for i = 0 to M − 1
- The basic framework can be used to solve many practical
problems, once R and d are known or estimated
- There are many tricks for obtaining R and d in practical
applications
- J. McNames
Portland State University ECE 539/639 Applications
- Ver. 1.02