
SLIDE 1
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
NSF National Robotics Initiative: Rapid exploration of robotic ankle - - PowerPoint PPT Presentation
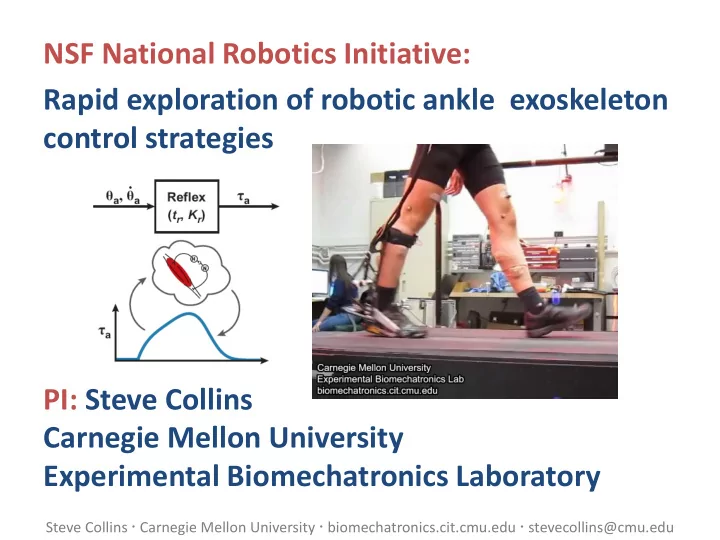
NSF National Robotics Initiative: Rapid exploration of robotic ankle exoskeleton control strategies PI: Steve Collins Carnegie Mellon University Experimental Biomechatronics Laboratory Steve Collins Carnegie Mellon University
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu
Steve Collins Carnegie Mellon University biomechatronics.cit.cmu.edu stevecollins@cmu.edu