
SLIDE 1
New Methods for Time Series and Panel Econometrics
Peter C. B. Phillips Cowles Foundation, Yale University
IMF Seminar: September 29, 2003
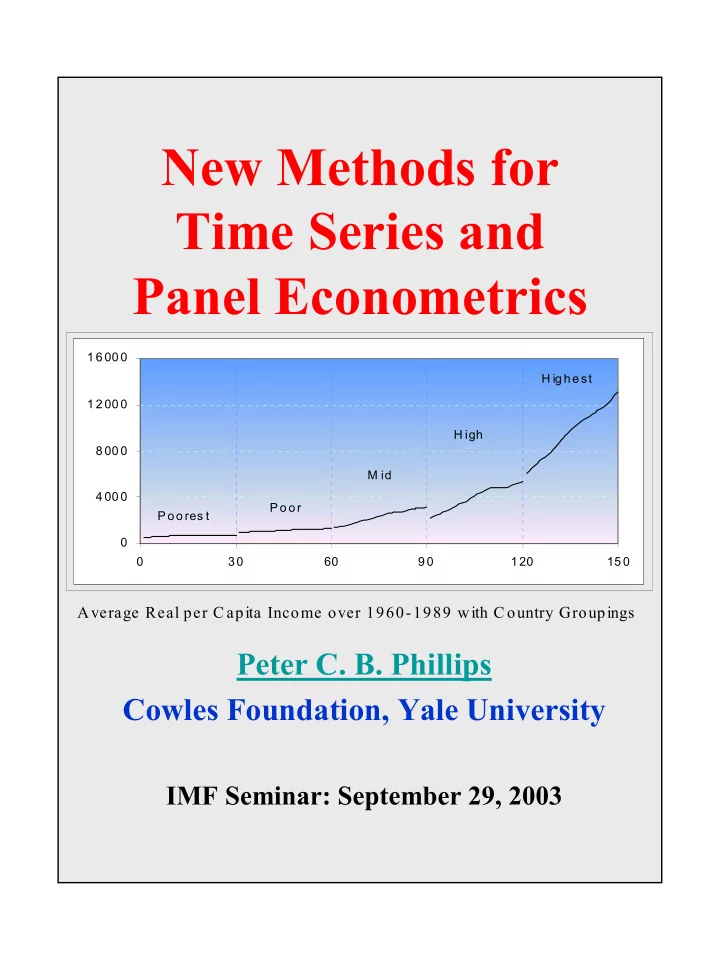
4 00 0 8 00 0 1 2 00 0 1 6 00 0 3 0 60 9 0 1 20 15 0 Po o res t Po o r M id H igh H ig h e st
Average Real per C apita Income over 1960-1989 with C ountry Groupings