
SLIDE 1
J RAPID: Ground and Aerial Robots for Rapid Response; Remote - - PowerPoint PPT Presentation
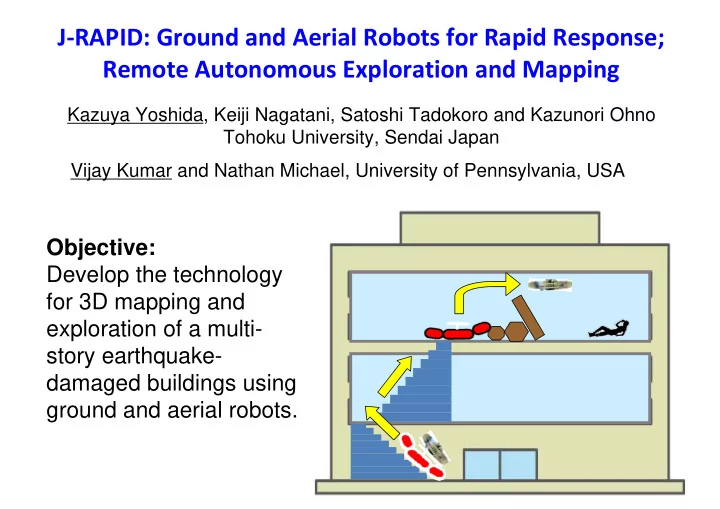
J RAPID: Ground and Aerial Robots for Rapid Response; Remote Autonomous Exploration and Mapping Kazuya Yoshida, Keiji Nagatani, Satoshi Tadokoro and Kazunori Ohno Tohoku University, Sendai Japan Vijay Kumar and Nathan Michael, University of
Even though ground robot vehicles, Kenaf and Quince are
There is certain demand and advantage on the exploration
Battery-driven Micro Aerial Vehicles have limited operation
Collaborative m apping of an earthquake‐dam aged
A TED talk by Prof. Vijay Kumar, also broadcasted in Japan
Combination of Ground Vehicles and Micro Aerial
There are a number of potential applications:
Rapid response to volcanic eruptions is also important
Development of higher degrees of autonom y to decrease