
SLIDE 1
Orthogonal Matrices
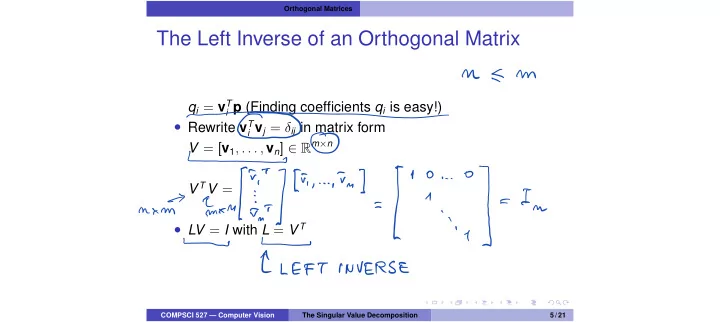
The Left Inverse of an Orthogonal Matrix
qi = vT
i p (Finding coefficients qi is easy!)
- Rewrite vT
i vj = δij in matrix form
V = [v1, . . . , vn] 2 Rm×n V TV =
- LV = I with L = V T
COMPSCI 527 — Computer Vision The Singular Value Decomposition 5 / 21
M E m
O_O
mm
It
L
In
LEFT INVERSE