SLIDE 1 1.
Internal Model Principle
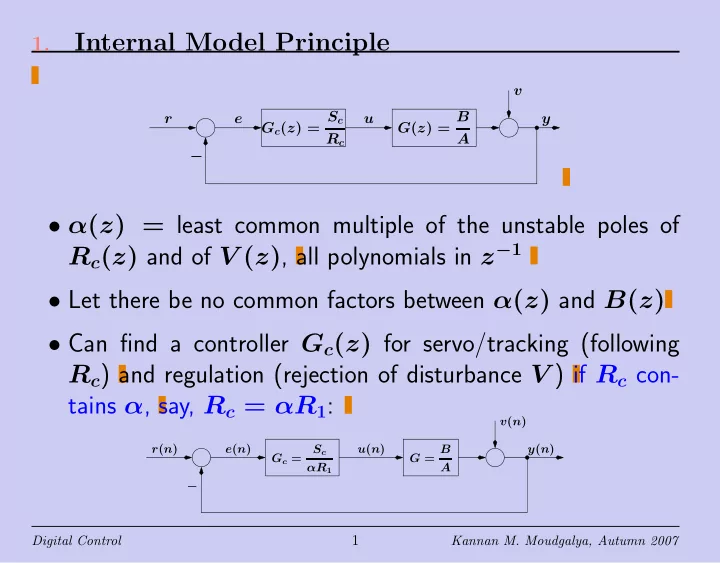
r − G(z) = B A Gc(z) = Sc Rc u e y v
- α(z) = least common multiple of the unstable poles of
Rc(z) and of V (z), all polynomials in z−1
- Let there be no common factors between α(z) and B(z)
- Can find a controller Gc(z) for servo/tracking (following
Rc) and regulation (rejection of disturbance V ) if Rc con- tains α, say, Rc = αR1:
e(n) − y(n) G = B A r(n) Gc = Sc αR1 u(n) v(n)
Digital Control
1
Kannan M. Moudgalya, Autumn 2007
SLIDE 2 2.
Internal Model Principle - Regulation
e(n) − y(n) G = B A r(n) Gc = Sc αR1 u(n) v(n)
Y (z) = Sc R1 1 α B A 1 + Sc R1 1 α B A R + 1 1 + Sc R1 1 α B A V = ScB R1Aα + ScBR + R1Aα R1Aα + ScB bV αaV
- Unstable pole present in α gets cancelled
- Regulation problem verified
Digital Control
2
Kannan M. Moudgalya, Autumn 2007
SLIDE 3 3.
Internal Model Principle - Servo
e(n) − y(n) G = B A r(n) Gc = Sc αR1 u(n) v(n)
Y (z) = ScB R1Aα + ScBR + R1Aα R1Aα + ScBV Servo problem: assume V = 0: E(z) = R(z) − Y (z) =
ScB R1Aα + ScB
R1Aα R1Aα + ScB bR αaR
- Unstable poles of Rc are cancelled by zeros of α.
- Can choose Rc and Sc such that R1Aα + ScB has roots
within the unit circle (pole placement)
- IM Principle: unstable poles of V , Rc appear in loop thro’
α
Digital Control
3
Kannan M. Moudgalya, Autumn 2007
SLIDE 4 4.
Internal Stability
u(n) e(n) − y(n) + r(n) gc(n) g(n)
- Notion in UG classes: output has to be stable
- Output being stable is not sufficient
- Every signal in the loop should be bounded
- If any signal is unbounded, will result in saturation / overflow
/ explosion
- When every signal is bounded, called internal stability
- If output is stable and if there is no unstable pole-zero can-
cellation, internal stability
Digital Control
4
Kannan M. Moudgalya, Autumn 2007
SLIDE 5 5.
- Unstb. Pole-Zero Cancel. = No Int. Stability
+ − + r1 Gc = n2 d2 r2 G = n1 d1 e1 e2 y +
E1 E2
1 1 + GGc − G 1 + GGc Gc 1 + GcG 1 1 + GcG R1 R2
d1d2 n1n2 + d1d2 − n1d2 n1n2 + d1d2 n2d1 n1n2 + d1d2 d1d2 n1n2 + d1d2 R1 R2
- Suppose d1, n2 have a common factor:
d1 = (z + a)d′
1
n2 = (z + a)n′
2
Digital Control
5
Kannan M. Moudgalya, Autumn 2007
SLIDE 6
6.
Unstable Pole-Zero Cancellation = No Internal Stability Assume the cancellation of z + a, G(z) = n1(z) (z + a)d′
1(z),
Gc(z) = (z + a)n′
2(z)
d2(z) with |a| > 1. Assume stability of TE = 1 1 + GGc = d′
1d2
d′
1d2 + n1n′ 2
T.F. between R2 and Y can be shown to be unstable. Let R1 = 0. Y R2 = G 1 + GGc = n1d2 (d′
1d2 + n1n′ 2)(z + a)
It is unstable and a bounded signal injected at R2 will produce an unbounded signal at Y
Digital Control
6
Kannan M. Moudgalya, Autumn 2007
SLIDE 7 7.
Forbid Unstable Pole-Zero Cancellation: Loop Variable
- Internal stability = all variables in loop are bounded for bounded
external inputs at all locations
- Can be checked by the following closed loop diagram
+ − + r1 Gc = n2 d2 r2 G = n1 d1 e1 e2 y +
- Can show that Output is stable + no pole-zero cancellation
= internal stability
Digital Control
7
Kannan M. Moudgalya, Autumn 2007
SLIDE 8 8.
Forbid Unstable Pole-Zero Cancellation ⇒ Get Causality Not possible to realize this controller: Gc = 1 + z−1 z−1 All sampled systems have at least one delay: G(z−1) = z−kB(z−1) A(z−1) = z−kb0 + b1z−1 + b2z−2 + · · · 1 + a1z−1 + a2z−2 + · · ·
- Controller not realizable ⇒ there is a common factor z−1
between plant and controller
- z−1 = 0 ⇒ z = ∞, an unstable pole
- If unstable pole-zero cancellation is forbidden while designing
controllers, z−1 cannot appear in the denominator of the controller - i.e., controller is realizable
Digital Control
8
Kannan M. Moudgalya, Autumn 2007
SLIDE 9
9.
Delay Specification for Realizability Closed loop delay has to be ≥ open loop delay: G(z) = z−kB(z) A(z) = z−kb0 + b1z−1 + · · · 1 + a1z−1 + · · · b0 = 0. Suppose that we use a feedback controller of the form Gc(z) = z−d Sc(z) Rc(z) = z−ds0 + s1z−1 + · · · 1 + r1z−1 + · · · with s0 = 0 and d ≥ 0. Closed loop transfer function: T = GGc 1 + GGc = z−k−d b0s0 + (b0s1 + b1s0)z−1 + · · · 1 + (s1 + r1)z−1 + · · · + z−k−d(b0s0 + · · · )
Digital Control
9
Kannan M. Moudgalya, Autumn 2007
SLIDE 10 10.
Delay Specification for Realizability T = z−k−d b0s0 + (b0s1 + b1s0)z−1 + · · · 1 + (s1 + r1)z−1 + · · · + z−k−d(b0s0 + · · · )
- Closed loop delay = k + d ≥ k = open loop delay.
- Can make it less only by d < 0, but controller is unrealizable.
Digital Control
10
Kannan M. Moudgalya, Autumn 2007
SLIDE 11
11.
Example: What if Wrong Delay is Specified? Design a controller for the plant G = z−2 1 1 − 0.5z−1 so that the overall system has smaller delay: T = z−1 1 1 − az−1 Recall the standard closed loop transfer function: T = GGc/(1+ GGc). Solving for Gc, and substituting for T , G Gc = 1 G T 1 − T = 1 z−1 1 − 0.5z−1 1 − (a + 1)z−1 This controller is unrealizable, no matter what a is.
Digital Control
11
Kannan M. Moudgalya, Autumn 2007
SLIDE 12 12.
Specifications - Step Response Give unit step input in r. Output y should have
- 1. small rise time
- 2. small overshoot
- 3. small settling time
- 4. small steady state error
n e(n) n y(n)
Error e(n) of the following form sat- isfies the requirements: e(n) = ρn cos ωn, 0 < ρ < 1
× × ω ρ Im(z) Re(z)
Digital Control
12
Kannan M. Moudgalya, Autumn 2007
SLIDE 13 13.
Specifications - Step Response
n e(n) n y(n)
× × ω ρ Im(z) Re(z)
e(n) = ρn cos ωn 0 < ρ < 1
- 1. initial error is one
- 2. decaying oscillations about zero
- 3. steady state error is zero
Procedure: User will specify the following:
- 1. a maximum allowable fall time < Nr
- 2. a maximum allowable undershoot < ε
- 3. a minimum required decay ratio < δ
- We will develop a method to determine ρ and
ω satisfying the above requirements
- Calculate trans. fn. between e(n) - r(n
- Back calculate the controller Gc(z)
Digital Control
13
Kannan M. Moudgalya, Autumn 2007
SLIDE 14 14.
Small Fall Time in Error e(n) = ρn cos ωn, 0 < ρ < 1 Error becomes zero, i.e., e(n) = 0. for the first time when ωn = π 2 ⇒ n = π 2ω As want n < Nr, some given value, we get π 2ω < Nr ⇒ ω > π 2Nr
n e(n) n y(n)
Desired region:
Im(z) Re(z)
Digital Control
14
Kannan M. Moudgalya, Autumn 2007
SLIDE 15 15.
Small Undershoot e(n) = ρn cos ωn When does it reach first min.? de/dn = 0
- Not applicable, because n is an integer
- Look for a simpler expression
- Reaches min. approx. when ωn = π
e(n)|ωn=π = ρn cos ωn|ωn=π = −ρn|ωn=π = −ρπ/ω User specified maximum deviation = ε: ρπ/ω < ε, ρ < εω/π
n e(n) n y(n)
Desired region:
Im(z) Re(z)
Digital Control
15
Kannan M. Moudgalya, Autumn 2007
SLIDE 16 16.
Small Decay Ratio e(n) = ρn cos ωn Ratio of two successive peak/trough to be small
- First undershoot in e(n) occurs at ωn ≃ π
- First overshoot occurs at ωn ≃ 2π
Want this ratio to be less than user specified δ:
e(n)|ωn=π
ρn|ωn=π < δ δ = 0.5 ≃ 1/4 decay. δ = 0.25 ≃ 1/8 decay. ρ2π/ω ρπ/ω < δ ⇒ ρπ/ω < δ ⇒ ρ < δω/π
- Small undershoot: ρ < εω/π. Usually ε < δ
- Small undershoot satisfies fast decay
n e(n) n y(n)
Desired region:
Im(z) Re(z)
Digital Control
16
Kannan M. Moudgalya, Autumn 2007
SLIDE 17 17.
Overall Requirements
Im(z) Re(z) Im(z) Re(z) Re(z) Im(z)
Desired region by the current approach
Im(z) Re(z)
Obtained by discretization of continuous domain result (Astrom and Wittenmark)
Digital Control
17
Kannan M. Moudgalya, Autumn 2007
SLIDE 18
18.
Desired Transfer Function Desired error to a step input is e: e(n) = rn cos ωn Taking Z-transform, E(z) = z(z − r cos ω) z2 − 2zr cos ω + r2 For step input R(z). Transfer function between R(z)-E(z): TE(z) = E(z) R(z) = z(z − r cos ω) z2 − 2zr cos ω + r2 z − 1 z = (z − 1)(z − r cos ω) z2 − 2zr cos ω + r2 One approach: equate this to 1/(1 + GGc) and calculate Gc
Digital Control
18
Kannan M. Moudgalya, Autumn 2007
SLIDE 19 19.
Desired Transfer Function Transfer function between setpoint R(z) and actual output Y (z): TY (z) = 1 − TE(z) = 1 − z2 − zr cos ω − z + r cos ω z2 − 2zr cos ω + r2 = z(1 − r cos ω) + (r2 − r cos ω) z2 − 2zr cos ω + r2
△
= z−1 ψ(z−1) φcl(z−1)
- One approach: equate this to GGc/(1 + GGc), find Gc
- Can’t do it exactly - will use part of this approach
- We will mainly make use of φcl and not ψ
- TY (1) = 1 ⇒ No steady state offset between Y and R
Digital Control
19
Kannan M. Moudgalya, Autumn 2007