
SLIDE 1
Interactions Animating Dexterous Motions How can we easily animate - - PowerPoint PPT Presentation
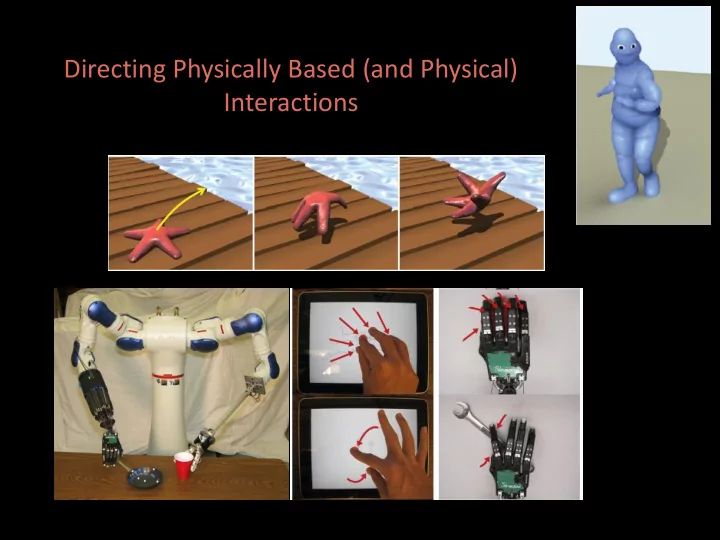
Directing Physically Based (and Physical) Interactions Animating Dexterous Motions How can we easily animate the starfishs escape? Appearance of intelligent motion Believable physical interaction with the glass box Dynamic,
interactions is hard
Lillian Y. Chang and Nancy S. Pollard, “Pre-Grasp Interaction for Object Acquisition in Difficult Tasks,” forthcoming book chapter
system, motivated by demonstrations like these!
modalities are needed and can be incorporated easily
Sentis and Khatib Laszlo, van de Panne, and Fiume van de Panne
configuration and low stiffness
Our observation: Different control modes are needed at different times to create animations sophisticated enough to tell a story Our solution: Put a variety of control modes into the animators hands and make them as intuitive as possible
Character model: Coarse volumetric model -> fast simulation Fine surface detail for appearance, contacts and collision User Interface: Real-time, trial and error (e.g., Jump like this!) Results: Compute muscle forces for the character to best achieve the user’s goals
Junggon Kim and Nancy S. Pollard, “Direct Control of Simulated Non-Human Characters,” IEEE CG&A, 2011
The user is placing a variety of constraints on the character’s motion How do we determine how the character should behave, in a physically realistic manner, to best meet those constraints?? Our only “lever” is accelerations or torques that must be applied at the character’s joints to advance the simulation Algebra on the equations of motion?
Complex, local-minimum prone, prioritized optimization??
Most quantities we care to measure or control have a locally linear relationship to joint accelerations and joint torques
Evangelos Kokkevis, Practical Physics for Articulated Characters, Game Developer's Conference 2004.
Express bone constraint as a linear function of joint accelerations: Straightforward differentiation of equations of motion Desired bone accelerations Bone accelerations when joint accelerations are zero Obtaining desired bone accelerations:
(1) Express all constraints as a linear function of joint accelerations: (2) Solve a Quadratic Program to obtain joint accelerations: (3) Use these accelerations for the next timestep to advance the simulation
http://www.youtube.com/watch?v=a-1AiExU3Vk Huai-Ti Lin, Tufts Biomimetic Devices Laboratory
Constraint priorities: Mouse drags are satisfied after everything else Contact modeling: “hallucinate” constraints to account for pushoff forces Objective functions: minimize joint accelerations, torques, or velocities Speed: Simulations are real-time or better; users preferred 3X-8X slower Ease of use: Starfish escape animations created by novices in minutes
Junggon Kim and Nancy S. Pollard, “Direct Control of Simulated Non-Human Characters,” IEEE CG&A, 2011 Junggon Kim and Nancy S. Pollard, “Fast Simulation of Skeleton-Driven Deformable Body Characters,” ACM ToG, 2011
http://www.cs.cmu.edu/~junggon/ http://www.cs.cmu.edu/~junggon/
Sticky Finger Manipulation With a Multi-Touch Interface 28
Manipulating virtual cloth Teleoperating a robot with a multi-fingered hand
Sticky Finger Manipulation With a Multi-Touch Interface 29
Common user input devices with simple command spaces
On/off Up, down, left, right
Realistic cloth tearing requires more than a single cursor to execute
Sticky Finger Manipulation With a Multi-Touch Interface 30
A panel of buttons is not the most intuitive interface for dexterous tele-manipulation
Sticky Finger Manipulation With a Multi-Touch Interface 31
Sticky Finger Manipulation With a Multi-Touch Interface 32
Creation Mode Sticky-Finger Mode Cut Mode
Sticky Finger Manipulation With a Multi-Touch Interface 33
Sticky Finger Manipulation With a Multi-Touch Interface 34
Sticky Finger Manipulation With a Multi-Touch Interface 35
Sticky Finger Manipulation With a Multi-Touch Interface 36
A mesh of particles connected by bend, shear and stretch constraints
Sticky Finger Manipulation With a Multi-Touch Interface 37
Sticky Finger Manipulation With a Multi-Touch Interface 38
x2 r x1 Case (a): x1 and x2 not stuck Correction vector Case (b): x1 stuck, x2 not stuck Case (c): if both are stuck, both = 0
unconstrained regions to elongate and eventually tear. Finger size matters too.
Sticky Finger Manipulation With a Multi-Touch Interface 39
Sticky Finger Manipulation With a Multi-Touch Interface 40
Similar to tearing but in a more controlled fashion
http://www.youtube.com/watch?v=x9Bjs99A0k0
Master-slave systems: Origami with the DaVinci surgical robot
http://www.youtube.com/watch?v=jOnp2M5qibs&feature=player_detailpage TVO: Doing the Dirty Work: Robots for Hire on the NASA Robonaut
Glove interfaces for dexterous hand control: Cyberglove interface
http://www.youtube.com/watch?v=_R40j64C7t8 Video from Shadow Robot Company
Glove interfaces for dexterous hand control: Cyberglove interface
Our observations: Manipulation operations often depend on precise fingertip motions Existing interfaces control them only indirectly Our solution: An inexpensive interface based on maintaining relative fingertip positions and trajectories
Yue Peng Toh and Nancy S. Pollard, “Sticky-Finger Teleoperation with A Multi-Touch Interface”, submitting to ICRA 2012.
Primary objective: control fingertip velocities Secondary objective: minimize palm roll Solution: joint velocities hand and arm
Yue Peng Toh and Nancy S. Pollard, “Sticky-Finger Teleoperation with A Multi-Touch Interface”, submitting to ICRA 2012.
55