
SLIDE 1
1
1
School of Computer Science
Receptor A Kinase C TF F Gene G Gene H Kinase E Kinase D Receptor B X1 X2 X3 X4 X5 X6 X7 X8 Receptor A Kinase C TF F Gene G Gene H Kinase E Kinase D Receptor B X1 X2 X3 X4 X5 X6 X7 X8 X1 X2 X3 X4 X5 X6 X7 X8
Probabilistic Graphical Models (10 Probabilistic Graphical Models (10-
- 708)
708)
Lecture 5, Sep 31, 2007
Eric Xing Eric Xing
The Belief Propagation (Sum-Product) Algorithm
Reading: J-Chap 4
Eric Xing 2
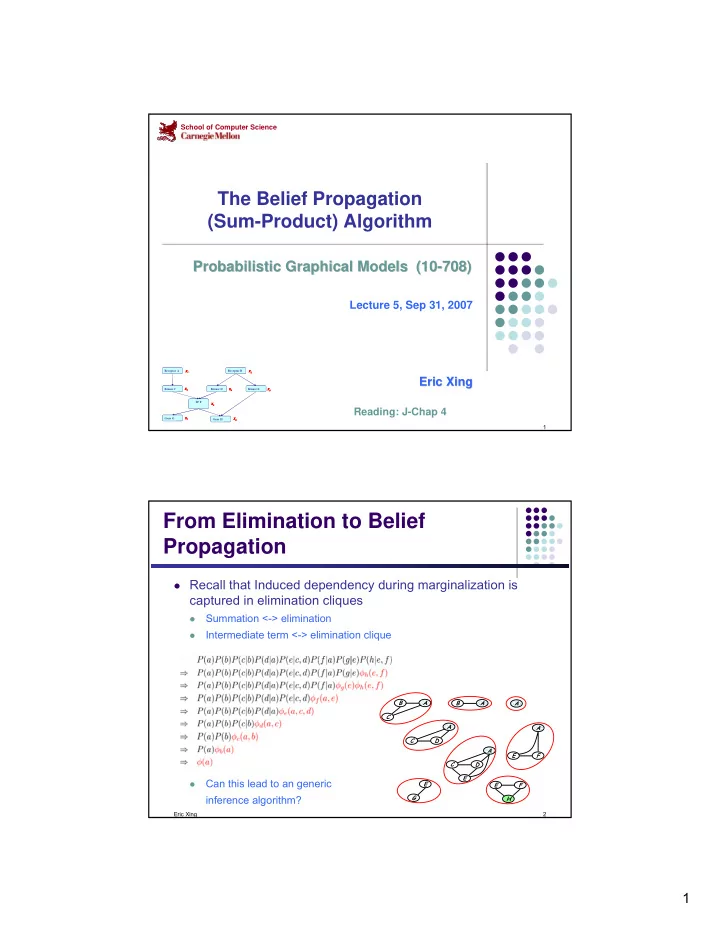
From Elimination to Belief Propagation
Recall that Induced dependency during marginalization is
captured in elimination cliques
- Summation <-> elimination
- Intermediate term <-> elimination clique
- Can this lead to an generic
inference algorithm?
E F H A E F B A C E G A D C E A D C B A A