
SLIDE 1
Curves and paths in space
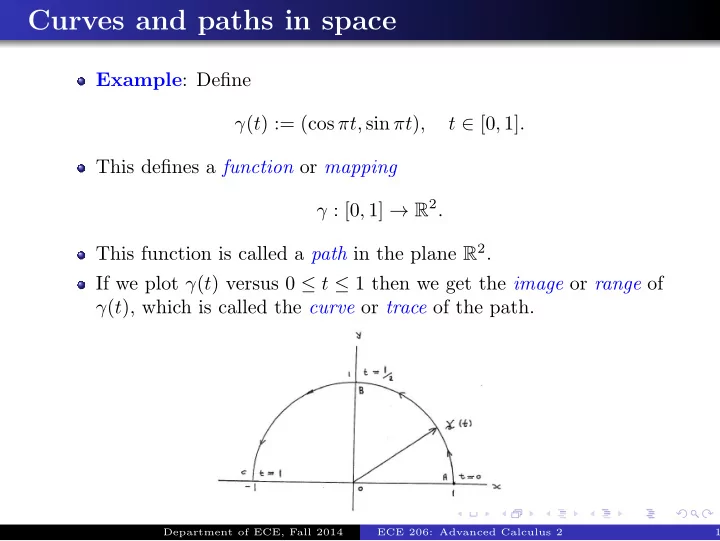
Example: Define γ(t) := (cos πt, sin πt), t ∈ [0, 1]. This defines a function or mapping γ : [0, 1] → R2. This function is called a path in the plane R2. If we plot γ(t) versus 0 ≤ t ≤ 1 then we get the image or range of γ(t), which is called the curve or trace of the path.
Department of ECE, Fall 2014 ECE 206: Advanced Calculus 2 1/18