
F18PA2 Pure Mathematics A Number Theory & Geometry
Chapter 1: The integers and divisibility
February 19, 2016
1 / 347
The integers
We will use the set of integers: Z = {. . . , −3, −2, −1, 0, 1, 2, 3, 4, . . . } and the non-negative integers; N0 = {0, 1, 2, 3, 4, . . . } the positive integers N = {1, 2, 3, 4, . . . }
- Note. Some people use the notation N for the set
{0, 1, 2, 3, 4, . . . } and some people use it for the set {1, 2, 3, 4, . . . }. To avoid this ambiguity we will use the above definitions, but we will usually avoid this notation and use the terminology ‘non-negative’ and ‘positive’ integers as defined above.
2 / 347
The integers
The set of integers Z comes equipped with:
◮ basic rules for arithmetic using addition and multiplication; ◮ ordering relation with its rules; ◮ key extra property: the well-ordering of the positive integers.
3 / 347
The relation
◮ we will use the order notation , , <, > ◮ we write, for example, a b if the integer a is less than or
equal to the integer b, so: −3 2, and 0 2 and 2 2. Note that a b allows for the possibility that a and b are equal, whereas a < b asserts that a is strictly less than and definitely not equal to b.
◮ any negative number is less than or equal to any positive
number: so −10 000 000 < 1.
◮ for every pair of integers a, b either a b or b a (or both). ◮ if a b and b a then a = b.
It is impossible for a < b and b < a to both be true.
4 / 347
The well-ordering axiom
The following well-ordering property holds in N: Theorem 1 If S is a non-empty set of positive integers then it contains an integer m such that m a for all a ∈ S. Remarks 2 In other words, any non-empty set of positive integers S contains a smallest element. Obviously, this result could not be true for an empty set, but when using the well-ordering axiom we have to remember to check that the sets we are applying it to are in fact non-empty. This harmless assertion turns out to be the principle that underlies much of our work with N and Z. Note. The well-ordering property does not hold in the set of rational numbers Q. E.g. the set {q ∈ Q : q > 0} does not have a smallest element.
5 / 347
Divisibility
Let a and b be integers. We say that b is a multiple of a, and write a|b, if there exists an integer q such that aq = b. Note that q = b/a. If b is not a multiple of a we write a | b. Equivalently, we say that a is a divisor, or a factor, of b, or that a divides b, We say that a is a proper divisor of b if 1 a < b. Be careful to distinguish a|b (statement ‘a divides b’) from a division such as a/b (the number ‘a divided by b’). E.g. 4|8 (8/4 = 2), 4 | 9 (9/4 = 2.25).
6 / 347
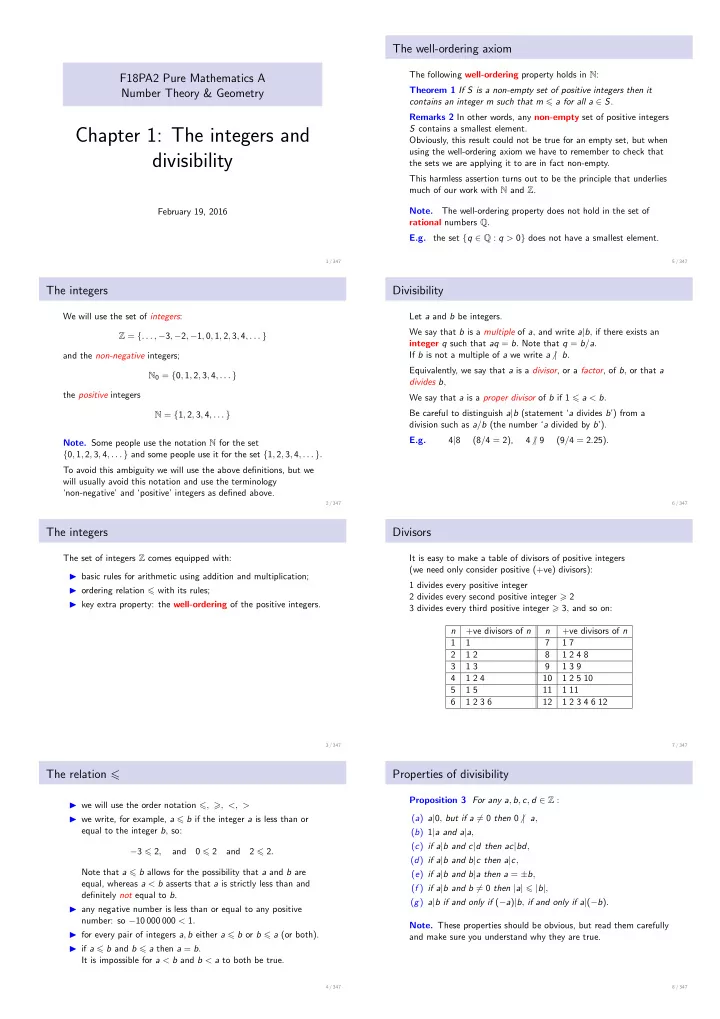
Divisors
It is easy to make a table of divisors of positive integers (we need only consider positive (+ve) divisors): 1 divides every positive integer 2 divides every second positive integer 2 3 divides every third positive integer 3, and so on: n +ve divisors of n n +ve divisors of n 1 1 7 1 7 2 1 2 8 1 2 4 8 3 1 3 9 1 3 9 4 1 2 4 10 1 2 5 10 5 1 5 11 1 11 6 1 2 3 6 12 1 2 3 4 6 12
7 / 347
Properties of divisibility
Proposition 3 For any a, b, c, d ∈ Z : (a) a|0, but if a = 0 then 0 | a, (b) 1|a and a|a, (c) if a|b and c|d then ac|bd, (d) if a|b and b|c then a|c, (e) if a|b and b|a then a = ±b, (f ) if a|b and b = 0 then |a| |b|, (g) a|b if and only if (−a)|b, if and only if a|(−b).
- Note. These properties should be obvious, but read them carefully
and make sure you understand why they are true.
8 / 347