
SLIDE 1
Backjumping
learn
Revision: 1.14 1
Backjumping learn Revision: 1.14 1 x x y y If y has never been - - PowerPoint PPT Presentation
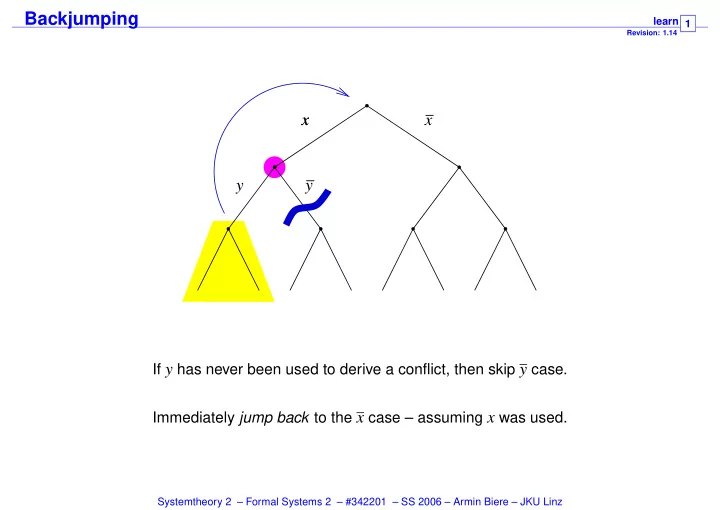
Backjumping learn Revision: 1.14 1 x x y y If y has never been used to derive a conflict, then skip y case. Immediately jump back to the x case assuming x was used. Systemtheory 2 Formal Systems 2 #342201 SS 2006 Armin
Revision: 1.14 1
Revision: 1.14 2
Revision: 1.14 3
Revision: 1.14 4
Revision: 1.14 5
Revision: 1.14 6
Revision: 1.14 7
Revision: 1.14 8
Revision: 1.14 9
Revision: 1.14 10
Revision: 1.14 11
Revision: 1.14 12
Revision: 1.14 13
Revision: 1.14 14
Revision: 1.14 15
Revision: 1.14 16
Revision: 1.14 17
Revision: 1.14 18
Revision: 1.14 19
Revision: 1.14 20
Revision: 1.14 21
Revision: 1.14 22
Revision: 1.14 23
Revision: 1.14 24
Revision: 1.14 25
Revision: 1.14 26
Revision: 1.14 27
Revision: 1.14 28
Revision: 1.14 29
Revision: 1.14 30
Revision: 1.14 31
Revision: 1.14 32
Revision: 1.14 33
Revision: 1.14 34
Revision: 1.14 35