
SLIDE 1
Artificial Intelligence 2Bh
AI2 - Module 3
Task 5: Learning from Data Task 6: Coping with Incomplete Information Lecturer: Mark Steedman e-mail: steedman@inf.ed.ac.uk Office: Room 2R.14, 2 Buccleuch Place Notes: Copies of the lecture slides. Activities: 18 lectures. Two practicals covering both tasks. Required Text: Russell & Norvig, 2nd Ed., Chaps. 13-16, 18-20. Further Reading: Tom Mitchell, Machine Learning, 1997.
AI2-LFD Introduction 1-1 course overview
Task 5: Learning from Data Overview
- 1. Introduction
- 2. Learning with Decision Trees.
- 3. Learning as Search.
- 4. Neural Networks: the Perceptron, multi-layer networks,
back-propagation. Text: Chapters 18-20 of Russell & Norvig
AI2-LFD Introduction 1-2
Learning from Data
Two related tasks in applying AI techniques to any task:
- 1. Represent relevant knowledge in a computationally tractable form.
- 2. Design and implement algorithms which effectively employ that
knowledge so represented to achieve the desired processing. Learning systems actually change and/or augment the represented knowledge on the basis of experience.
AI2-LFD Introduction 1-3
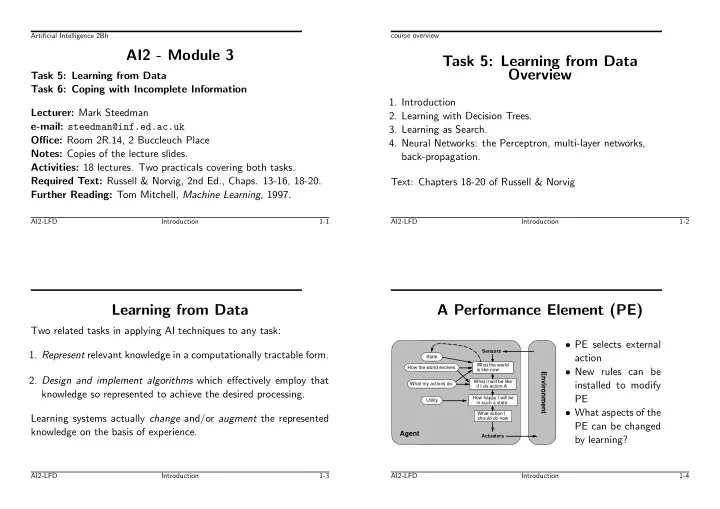
A Performance Element (PE)
Agent Environment
Sensors What it will be like if I do action A How happy I will be in such a state What action I should do now State How the world evolves What my actions do Utility Actuators What the world is like now
- PE selects external
action
- New rules can be
installed to modify PE
- What aspects of the
PE can be changed by learning?
AI2-LFD Introduction 1-4