
SLIDE 1
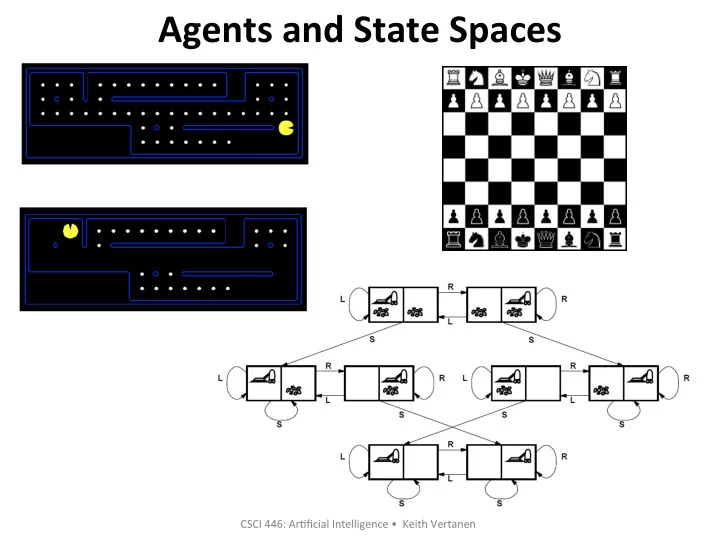
Agents ¡and ¡State ¡Spaces ¡
CSCI ¡446: ¡Ar*ficial ¡Intelligence ¡• ¡ ¡Keith ¡Vertanen ¡
Agents and State Spaces CSCI 446: Ar*ficial Intelligence - - PowerPoint PPT Presentation
Agents and State Spaces CSCI 446: Ar*ficial Intelligence Keith Vertanen Overview Agents and environments Ra*onality Agent types Specifying the
CSCI ¡446: ¡Ar*ficial ¡Intelligence ¡• ¡ ¡Keith ¡Vertanen ¡
2 ¡
3 ¡
4 ¡
5 ¡
6 ¡
7 ¡
8 ¡
9 ¡
10 ¡
11 ¡
12 ¡
13 ¡
14 ¡
15 ¡
16 ¡
17 ¡
18 ¡
19 ¡
Search ¡graph ¡for ¡a ¡#ny ¡search ¡problem. ¡
20 ¡
21 ¡
22 ¡
23 ¡