
SLIDE 1
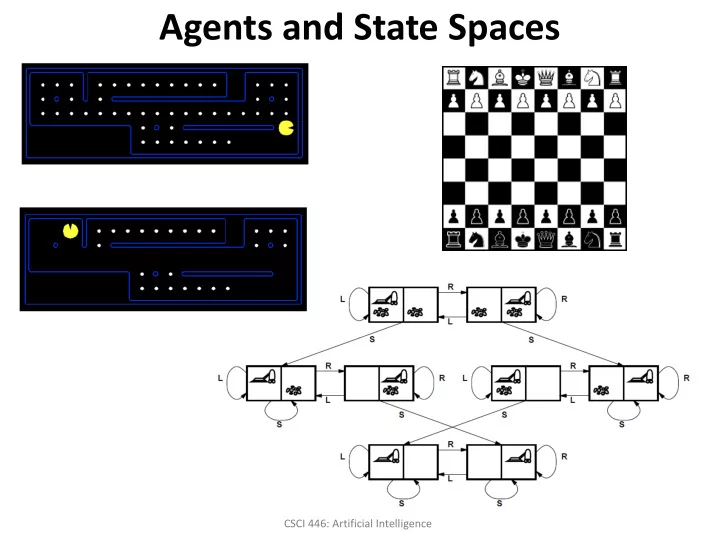
Agents and State Spaces
CSCI 446: Artificial Intelligence
Agents and State Spaces CSCI 446: Artificial Intelligence Overview - - PowerPoint PPT Presentation
Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
CSCI 446: Artificial Intelligence
2
3
4
5
6
10 10 20 20 30 30 40 40 50 50 60 60 70 80
9 12 1 4 6 7 2 10 3 11 5 8
Planned Measurements per Target Three or More Measurements in a Two Second Window per Target Balanced Measurements Across Multiple Targets Total Number of Measurements Taken Average Tracking Error
8
9
10
11
12
13
14
15
16
17
18
19
20
Search graph for a tiny search problem.
21
22
23
24