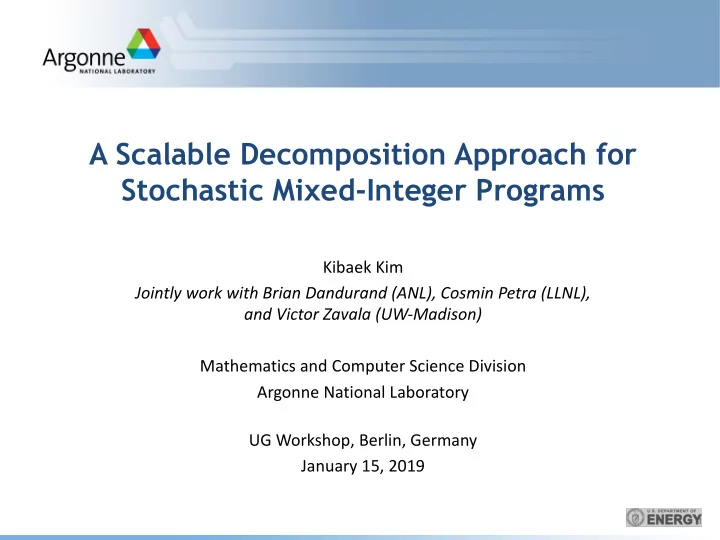
SLIDE 6 1 2 3 4 5 1 2 3 4 5 −55 −50 −45 −40 −35 −30 x1 x2 cT x + E[Q(x,ω)]
Dual Decomposition for SMIP
§ Becomes More Challenging!
– The recourse function is nonconvex and discontinuous. – Benders Decomposition cannot be used.
§ Dual Decomposition
– Lagrangian relaxation of the nonanticipativity constraints – Seek for the best lower bound by solving
Decomposed in each scenario j z ≥ zLD := max
λ N
X
j=1
Dj(λ)
6
min cT x(ω1) +q(ω1)T y(ω1) + . . . +cT x(ω1) +q(ωN)T y(ωN) s.t. Ax(ω1) ≥ b, T(ω1)x(ω1) +W(ω1)y(ω1) ≥ h(ω1) . . . ... . . . Ax(ωN) ≥ b T(ωN)x(ωN) +W(ωN)y(ωN) ≥ h(ωN) x(ω1) . . . = x(ωN) x(ω1), . . . x(ωN) ∈ Rn1−p1
+
× Zp1
+
y(ω1), . . . y(ωN) ∈ Rn2−p2
+
× Zp2
+
Nonanticipaticity constraints
z = min
x0,xj,yj N
X
j=1
pj
j yj
(xj, yj) ∈ Gj, j = 1, . . . , N,
N
X
j=1
Hjxj = 0 (λ)
Nonanticipaticity constraints
D(λ) := min
xj,yj N
X
j=1
[pj(cT xj + qT
j yj) − λT Hjxj]
s.t. (xj, yj) ∈ Gj, j = 1, . . . , N