
SLIDE 1
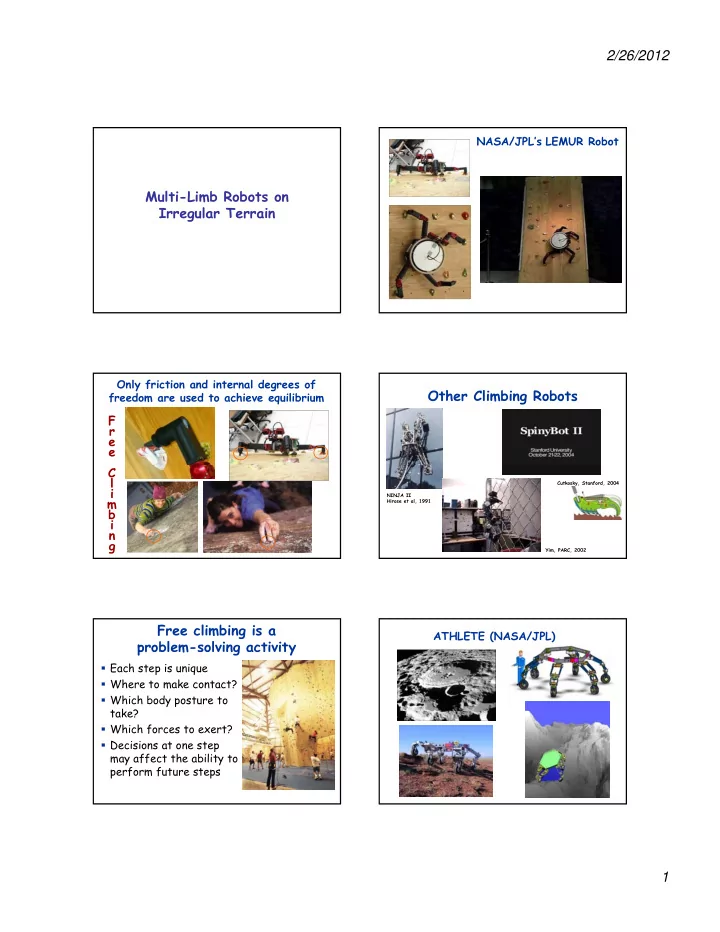
2/26/2012 1 Multi-Limb Robots on Irregular Terrain g
NASA/JPL’s LEMUR Robot Only friction and internal degrees of freedom are used to achieve equilibrium
F r e e C l i m b i n g
Other Climbing Robots
NINJA II Hirose et al, 1991 Yim, PARC, 2002 Cutkosky, Stanford, 2004