
SLIDE 1
1
- 15. Poisson Processes
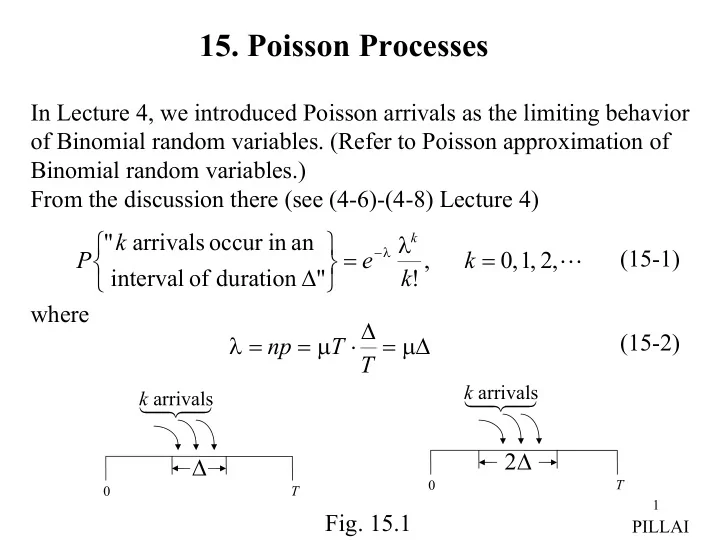
In Lecture 4, we introduced Poisson arrivals as the limiting behavior
- f Binomial random variables. (Refer to Poisson approximation of
Binomial random variables.) From the discussion there (see (4-6)-(4-8) Lecture 4) where
- ,
2 , 1 , , ! " duration
- f
interval an in
- ccur
arrivals " = = ∆
−
k k e k P
k
λ
λ
(15-1) ∆ = ∆ ⋅ = = µ µ λ T T np (15-2)
- Fig. 15.1
PILLAI
∆
T
- arrivals
k
∆ 2
T
- arrivals