
1
Slide 1Decision graphs II (Limited Memory) Influence Diagrams
Advanced Herd Management Anders Ringgaard Kristensen
Slide 2Outline
Decision trees Optimization methods
- Decision tree
- Strong junction tree
- Single Policy Updating
Markov property versus “no forgetting” Decision node ordering Advantages and disadvantages of decision graphs
Slide 3Decision trees
A very common technique for evaluation of alternative decisions over time. In particular popular in the veterinary community. Example diseased calf:
- Treat: Yes/ no
- Cost of treatment: 100 DKK
- Value of surviving calve: 1650 DKK
- Cost of dead calf: 70 DKK
- Survival of animals:
- Treated: 0.88
- Untreated: 0.60
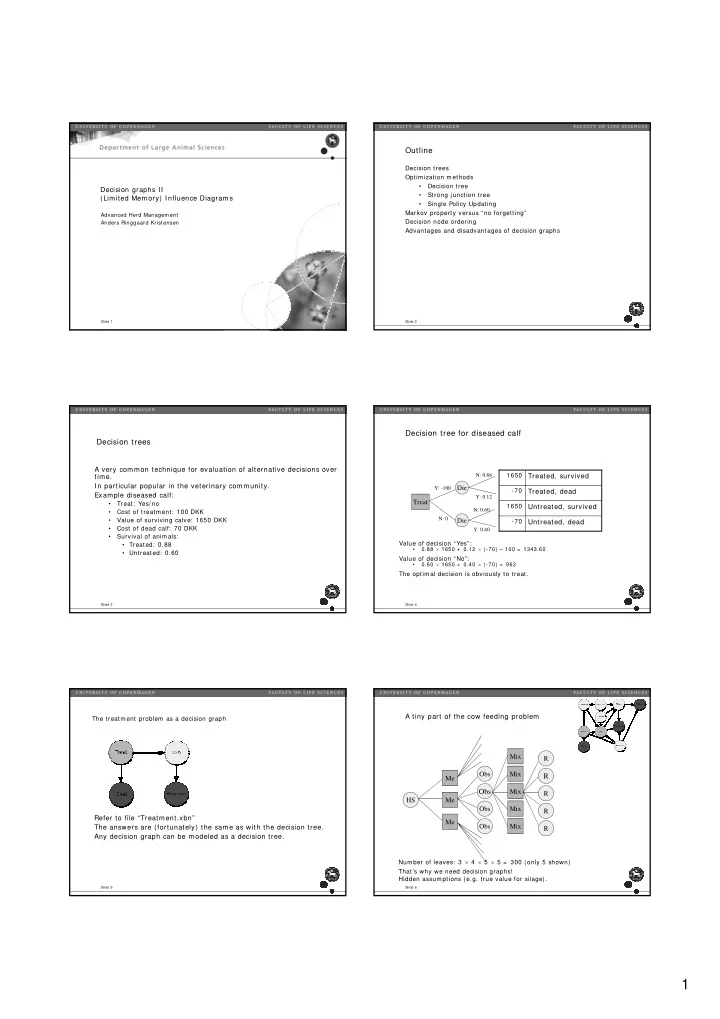
Decision tree for diseased calf
Value of decision “Yes”:
- 0.88 × 1650 + 0.12 × (-70) – 100 = 1343.60
Value of decision “No”:
- 0.60 × 1650 + 0.40 × (-70) = 962
The optimal decision is obviously to treat.
Treat Die Die
Y: -100 N: 0 N: 0.88 Y: 0.12
- 70
1650
- 70
1650
Untreated, dead Untreated, survived Treated, dead Treated, survived
N: 0.60 Y: 0.40
Slide 5The treatment problem as a decision graph
Refer to file “Treatment.xbn” The answers are (fortunately) the same as with the decision tree. Any decision graph can be modeled as a decision tree.
Slide 6A tiny part of the cow feeding problem
Number of leaves: 3 × 4 × 5 × 5 = 300 (only 5 shown) That’s why we need decision graphs! Hidden assumptions (e.g. true value for silage).
Me HS Me Me Obs Obs
Obs
Obs Mix Mix Mix R R
R
R R Mix Mix