
SLIDE 1
1
EU-Japan Workshop
1 2014.06.11
‘Toward a new era of EU-Japan cooperation in Robotics: rationale and objectives’
Masakatsu G. Fujie
1Faculty of Science and Engineering,
Waseda University, Tokyo, Japan
Research and Innovation in Robotics: New Opportunities for EU-Japan Cooperation
2014.06.11
2014.06.11 2
EU-Japan Workshop
5 10 15 20 30 25
(%) (%)
1980 1990 2000 2010 2020 2030
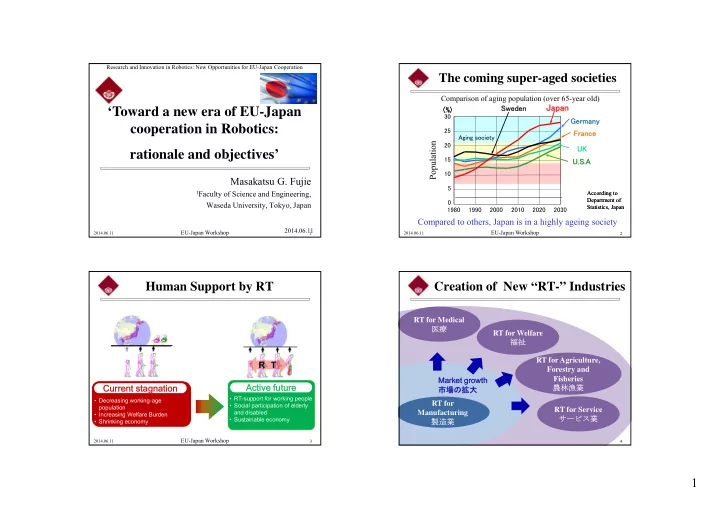
Sweden Germany France UK U.S.A
Japan
According to Department of Statistics, Japan According to Department of Statistics, Japan
The coming super-aged societies
Aging society
Compared to others, Japan is in a highly ageing society Population
Comparison of aging population (over 65-year old)
2014.06.11 3
EU-Japan Workshop
Human Support by RT
- Decreasing working-age
population
- Increasing Welfare Burden
- Shrinking economy
Current stagnation
- RT-support for working people
- Social participation of elderly
and disabled
- Sustainable economy
Active future
2014.06.11 4
EU-Japan Workshop