
SLIDE 1
David Lindelöf useR! 2006 15/06/2006 Vienna david.lindelof@epfl.ch
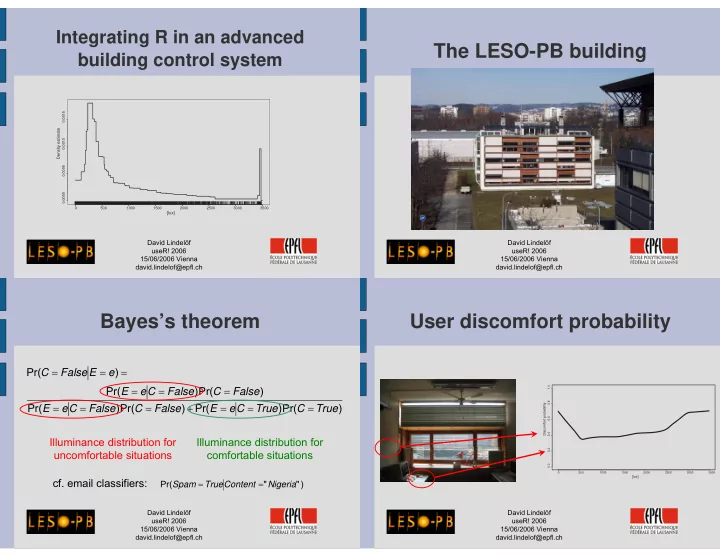
Integrating R in an advanced building control system
500 1000 1500 2000 2500 3000 3500 0.0000 0.0005 0.0010 0.0015
[lux] Density estimate
David Lindelöf useR! 2006 15/06/2006 Vienna david.lindelof@epfl.ch
The LESO-PB building
David Lindelöf useR! 2006 15/06/2006 Vienna david.lindelof@epfl.ch
Bayes’s theorem
) Pr( ) Pr( ) Pr( ) Pr( ) Pr( ) Pr( ) Pr( True C True C e E False C False C e E False C False C e E e E False C = = = + = = = = = = = = = Illuminance distribution for uncomfortable situations Illuminance distribution for comfortable situations
) " " Pr( Nigeria Content True Spam = =
- cf. email classifiers:
David Lindelöf useR! 2006 15/06/2006 Vienna david.lindelof@epfl.ch
User discomfort probability
500 1000 1500 2000 2500 3000 3500 0.0 0.2 0.4 0.6 0.8 1.0 [lux] Discomfort probability