
SLIDE 1
Department of Chemical Engineering I.I.T. Bombay, India
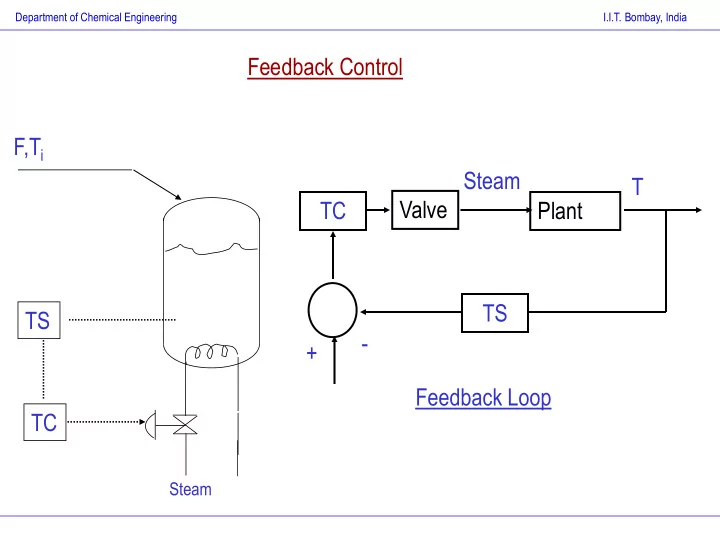
F,Ti TS TC Feedback Control
Steam
Plant T Steam Valve TC TS +
- Feedback Loop
T Valve TC Plant TS TS - + Feedback Loop TC Steam - - PowerPoint PPT Presentation
Department of Chemical Engineering I.I.T. Bombay, India Feedback Control F,T i Steam T Valve TC Plant TS TS - + Feedback Loop TC Steam Department of Chemical Engineering I.I.T. Bombay, India Typical Elements of the Feedback Loop
Department of Chemical Engineering I.I.T. Bombay, India
Steam
Department of Chemical Engineering I.I.T. Bombay, India
Controller Signal (4-20 mA/ 1-5V/ 3-15 psi)
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
variable) measured
range maximum ( K
controller
range maximum .( 100
c
PB
Department of Chemical Engineering I.I.T. Bombay, India
t I c s
dt t t K p t p t c ) ( 1 ) ( ) ( ) ( s K s s c s g
I c c
1 1 ) ( ) ( ) (
Department of Chemical Engineering I.I.T. Bombay, India
p
t
Department of Chemical Engineering I.I.T. Bombay, India
t D I c s
dt t d dt t t K p t p t c ) ( ) ( 1 ) ( ) ( ) ( s s K s s c s g
D I c c
1 1 ) ( ) ( ) (
Department of Chemical Engineering I.I.T. Bombay, India
Plant controller yd +
u disturbance d + +
Department of Chemical Engineering I.I.T. Bombay, India
) ( ) ( ) ( s s g s u
c
) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s d s g s s g s g s d s g s u s g s y
d c p d p
) ( ) ( ) ( s y s y s
d
) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( 1 ) ( ) ( ) ( , ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s d s g s g s g s y s g s g s g s g s y
s d s g s y s g s g s y s g s g s y
c p d d c p c p d d c p c p
Department of Chemical Engineering I.I.T. Bombay, India
1 1 1 1 1 1 1 1 ) ( s KK KK KK s s KK s KK s y
c c c c c
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
t d I d c
t d I d c
d I c c
2 2 1
2 1
d c c I I I c
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
D c
d c D c D c
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Period Sign of error Type of current action More or less Corrective action necessary sign of de/dt Effect of derivative action (0,t1) positive heating more decrease heat negative decrease heat (t1,t2) negative cooling less increase cooling negative increase cooling (t2,t3) negative cooling more decrease cooling positive decrease cooling
Department of Chemical Engineering I.I.T. Bombay, India
c
c
Department of Chemical Engineering I.I.T. Bombay, India
t I c c
I c
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
p c
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
…..
…..
…..
…..
1 5 4 1 2 1 3 2 1 1
1 3 1 5 1 2 1 2 1 3 1 1
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
5 . 1
s ml
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
c
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
% valve % stem position Equal percentage Linear valve Quick opening
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India