
SLIDE 1
HEURISTIC OPTIMIZATION
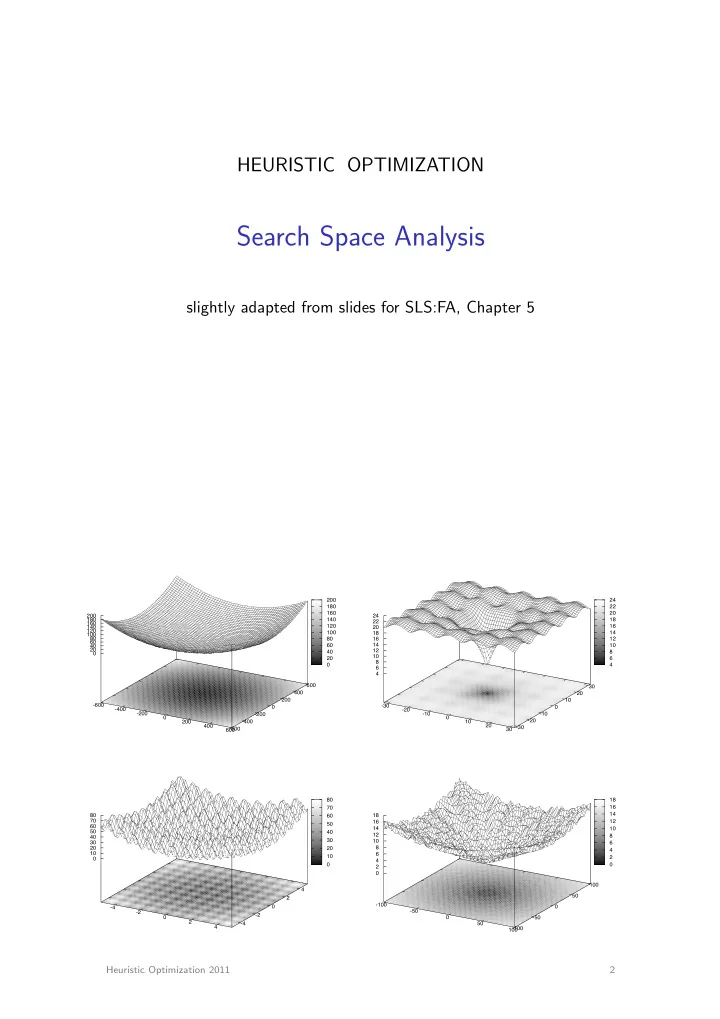
Search Space Analysis
slightly adapted from slides for SLS:FA, Chapter 5
20 40 60 80 100 120 140 160 180 200
- 600
- 400
- 200
200 400 600
- 600
- 400
- 200
200 400 600 20 40 60 80 100 120 140 160 180 200 4 6 8 10 12 14 16 18 20 22 24
- 30
- 20
- 10
10 20 30 -30
- 20
- 10
10 20 30 4 6 8 10 12 14 16 18 20 22 24 10 20 30 40 50 60 70 80
- 4
- 2
2 4
- 4
- 2
2 4 10 20 30 40 50 60 70 80 2 4 6 8 10 12 14 16 18
- 100
- 50
50 100
- 100
- 50
50 100 2 4 6 8 10 12 14 16 18
Heuristic Optimization 2011 2