
SLIDE 1
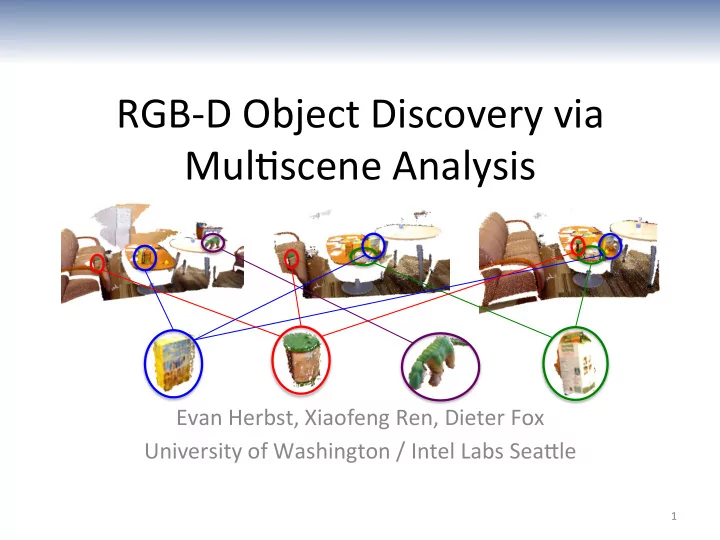
RGB-‑D ¡Object ¡Discovery ¡via ¡ Mul7scene ¡Analysis ¡
Evan ¡Herbst, ¡Xiaofeng ¡Ren, ¡Dieter ¡Fox ¡ University ¡of ¡Washington ¡/ ¡Intel ¡Labs ¡SeaIle ¡
1 ¡
RGB-D Object Discovery via Mul7scene Analysis Evan Herbst, - - PowerPoint PPT Presentation
RGB-D Object Discovery via Mul7scene Analysis Evan Herbst, Xiaofeng Ren, Dieter Fox University of Washington / Intel Labs SeaIle 1 Problem Descrip7on
1 ¡
2 ¡
§ Handle ¡textureless ¡objects ¡ § Avoid ¡appearance/shape ¡priors ¡
3 ¡
4 ¡
. ¡. ¡. ¡ [ICRA11] ¡
§ ¡probabilis7c ¡sensor ¡measurement ¡model ¡
§ Incorporate ¡depth, ¡color, ¡surface ¡orienta7on ¡ § Handle ¡occlusion ¡ § View-‑based: ¡accumulate ¡evidence ¡from ¡different ¡viewpoints ¡
§ Can ¡only ¡make ¡use ¡of ¡two ¡scenes ¡ § No ¡no7on ¡of ¡segment ¡persistence ¡
5 ¡
6 ¡
ED(s,l) =
j
p(s moved in j), lj = 0 1" p(s moved in j), lj =1 # $ % & %
two-‑scene ¡MRFs ¡
7 ¡
mul7scene ¡MRF ¡
8 ¡
§ Minimize ¡similarity ¡across ¡clusters ¡ § Maximize ¡similarity ¡within ¡each ¡cluster ¡
A!V
, ¡
i, j ! V
i!A, j"A
i!A, j!V
9 ¡
10 ¡
11 ¡
12 ¡
13 ¡
14 ¡
15 ¡