
SLIDE 1
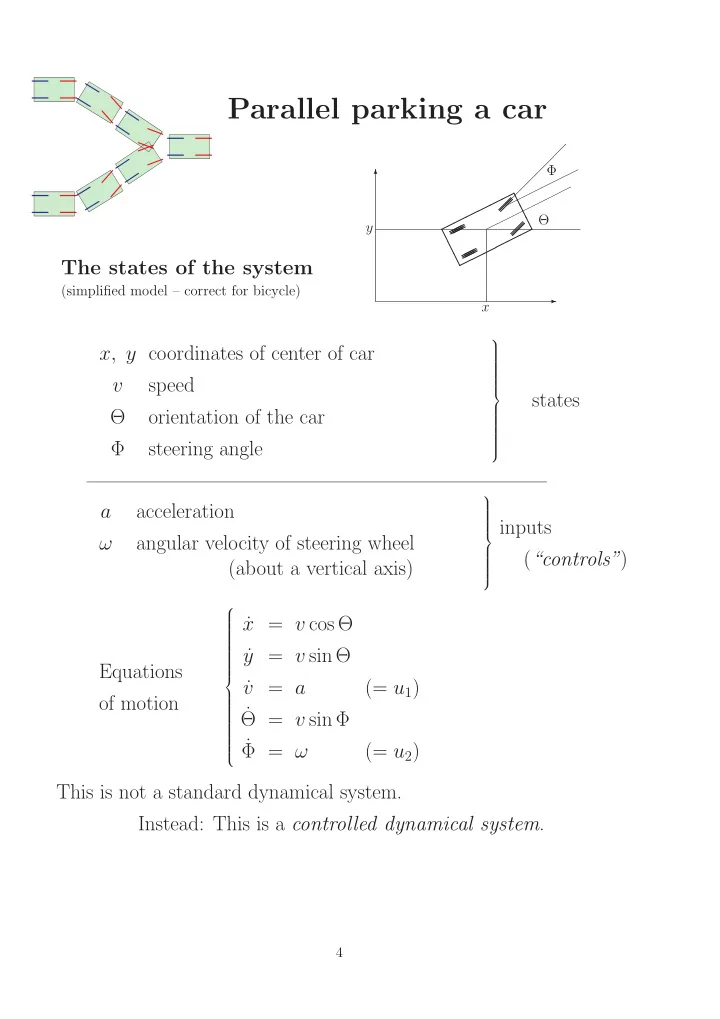
Parallel parking a car
The states of the system
(simplified model – correct for bicycle)
✟✟✟✟✟✟✟ ✲ ✻
x y Θ Φ
- ✟✟✟✟✟✟
✟✟✟✟✟✟ ✟✟✟✟✟✟ ❆ ❆ ❆ ❆ ❆ ❆ ✟ ✟ ✟ ✟ ✟ ✟ ✟ ✟ ✟ ✟ ✟ ✟
- x, y coordinates of center of car
v speed Θ
- rientation of the car
Φ steering angle
states a acceleration ω angular velocity of steering wheel (about a vertical axis)
inputs (“controls”) Equations
- f motion
˙ x = v cos Θ ˙ y = v sin Θ ˙ v = a (= u1) ˙ Θ = v sin Φ ˙ Φ = ω (= u2) This is not a standard dynamical system. Instead: This is a controlled dynamical system.
4