
SLIDE 1
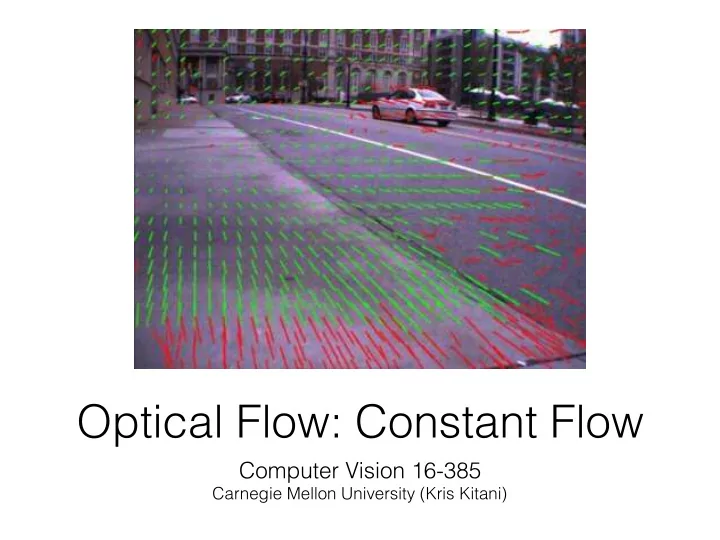
Optical Flow: Constant Flow
Computer Vision 16-385
Carnegie Mellon University (Kris Kitani)
Optical Flow: Constant Flow Computer Vision 16-385 Carnegie Mellon - - PowerPoint PPT Presentation
Optical Flow: Constant Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) Optical Flow (a.k.a., Video Stabilization, Tracking, Stereo Matching, Registration) Given a pair of images { I t , I t +1 } Estimate the optical flow
Computer Vision 16-385
Carnegie Mellon University (Kris Kitani)
Given a pair of images Estimate the optical flow field
Optical Flow
(a.k.a., Video Stabilization, Tracking, Stereo Matching, Registration)
spatial derivative
temporal derivative
Ix = ∂I ∂x Iy = ∂I ∂y u = dx dt v = dy dt It = ∂I ∂t How can we use the brightness constancy equation to estimate the optical flow?
known unknown We need at least ____ equations to solve for 2 unknowns.
known unknown Where do we get more equations (constraints)?
Where do we get more equations (constraints)? Assume that the surrounding patch (say 5x5) has ‘constant flow’
Flow is locally smooth Neighboring pixels have same displacement
Using a 5 x 5 image patch, gives us 25 equations Assumptions:
Flow is locally smooth Neighboring pixels have same displacement
Using a 5 x 5 image patch, gives us 25 equations Assumptions:
Ix(p1)u + Iy(p1)v = −It(p1) Ix(p2)u + Iy(p2)v = −It(p2) . . . Ix(p25)u + Iy(p25)v = −It(p25)
Flow is locally smooth Neighboring pixels have same displacement
Using a 5 x 5 image patch, gives us 25 equations 2 6 6 6 4 Ix(p1) Iy(p1) Ix(p2) Iy(p2) . . . . . . Ix(p25) Iy(p25) 3 7 7 7 5 u v
2 6 6 6 4 It(p1) It(p2) . . . It(p25) 3 7 7 7 5 Assumptions: Matrix form
Flow is locally smooth Neighboring pixels have same displacement
Using a 5 x 5 image patch, gives us 25 equations 2 6 6 6 4 Ix(p1) Iy(p1) Ix(p2) Iy(p2) . . . . . . Ix(p25) Iy(p25) 3 7 7 7 5 u v
2 6 6 6 4 It(p1) It(p2) . . . It(p25) 3 7 7 7 5
25 × 2
2 × 1
25 × 1
How many equations? How many unknowns? How do we solve this?
Assumptions:
Least squares approximation
ˆ x = arg min
x
||Ax − b||2 A>Aˆ x = A>b
is equivalent to solving
To obtain the least squares solution solve:
Least squares approximation
ˆ x = arg min
x
||Ax − b||2 A>Aˆ x = A>b
is equivalent to solving
2 4 P
p∈P
IxIx P
p∈P
IxIy P
p∈P
IyIx P
p∈P
IyIy 3 5 u v
2 4 P
p∈P
IxIt P
p∈P
IyIt 3 5 where the summation is over each pixel p in patch P
To obtain the least squares solution solve:
Least squares approximation
ˆ x = arg min
x
||Ax − b||2 A>Aˆ x = A>b
is equivalent to solving
2 4 P
p∈P
IxIx P
p∈P
IxIy P
p∈P
IyIx P
p∈P
IyIy 3 5 u v
2 4 P
p∈P
IxIt P
p∈P
IyIt 3 5 where the summation is over each pixel p in patch P
Sometimes called ‘Lucas-Kanade Optical Flow’ (can be interpreted to be a special case of the LK method with a translational warp model)
When is this solvable? ATA should be invertible ATA should not be too small ATA should be well conditioned
λ1 and λ2 should not be too small λ1/λ2 should not be too large (λ1=larger eigenvalue)
2 4 P
p∈P
IxIx P
p∈P
IxIy P
p∈P
IyIx P
p∈P
IyIy 3 5 Where have you seen this before?
2 4 P
p∈P
IxIx P
p∈P
IxIy P
p∈P
IyIx P
p∈P
IyIy 3 5 Where have you seen this before? Harris Corner Detector!
Lucas-Kanade optical flow works best
gradient (at least)
What happens when you have no ‘corners’?
You want to compute optical flow. What happens if the image patch contains only a line?
In which direction is the line moving?
small visible image patch
In which direction is the line moving?
small visible image patch
Want patches with different gradients to the avoid aperture problem
Want patches with different gradients to the avoid aperture problem
1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 4 5 5 5 5
1 1
2 2
3 3
4 4
y x y x
H(x,y) = y I(x,y)
It(3, 3) = I(3, 3) − H(3, 3) = −1
Ixu + Iyv + It = 0
Iy(3, 3) = 1
Ix(3, 3) = 0
v = 1
We recover the v of the optical flow but not the u. This is the aperture problem.
Compute gradients Solution: