
SLIDE 1
1
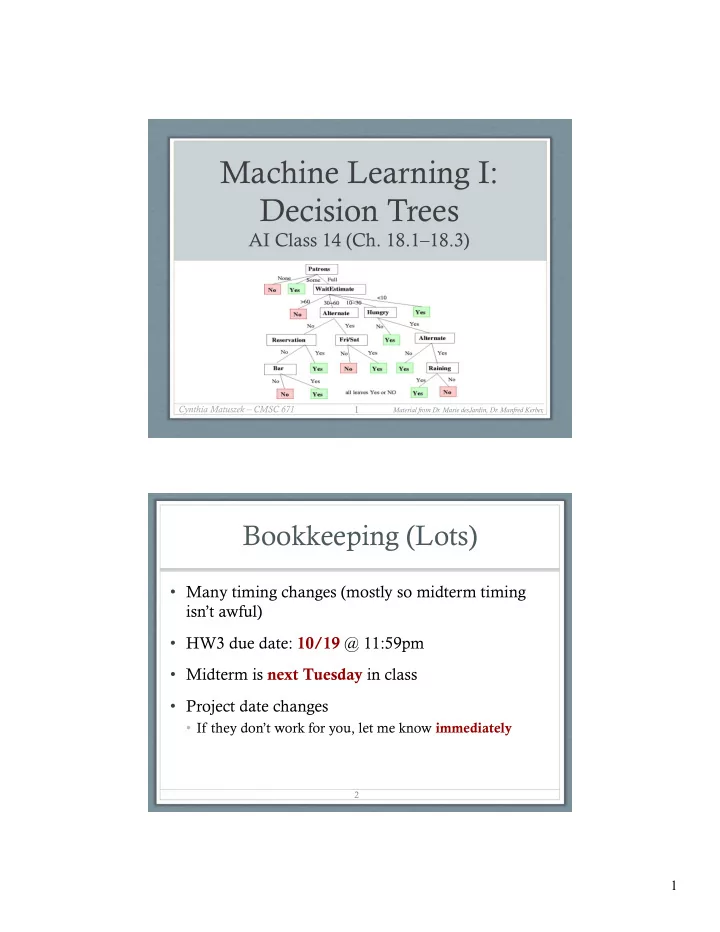
Machine Learning I: Decision Trees
AI Class 14 (Ch. 18.1–18.3)
Cynthia Matuszek – CMSC 671
Material from Dr. Marie desJardin, Dr. Manfred Kerber,
1
Bookkeeping (Lots)
- Many timing changes (mostly so midterm timing
isn’t awful)
- HW3 due date: 10/19 @ 11:59pm
- Midterm is next Tuesday in class
- Project date changes
- If they don’t work for you, let me know immediately
2