
SLIDE 1
UNIVERSITY OF TECHNOLOGY, SYDNEY UNIVERSITY OF TECHNOLOGY, SYDNEY FACULTY OF ENGINEERING FACULTY OF ENGINEERING
48550 Electrical Energy Technology 48550 Electrical Energy Technology
Switched Reluctance Motors Switched Reluctance Motors
Topics to cover:
- 1. Introduction
- 2. Structures & Torque Production
- 3. Drive Circuits
- 4. Performance
Introduction Introduction
The reluctance motor is an electric motor in which torque is produced by the tendency
- f its moveable part to move to a position
where the inductance of the excited winding is maximized.
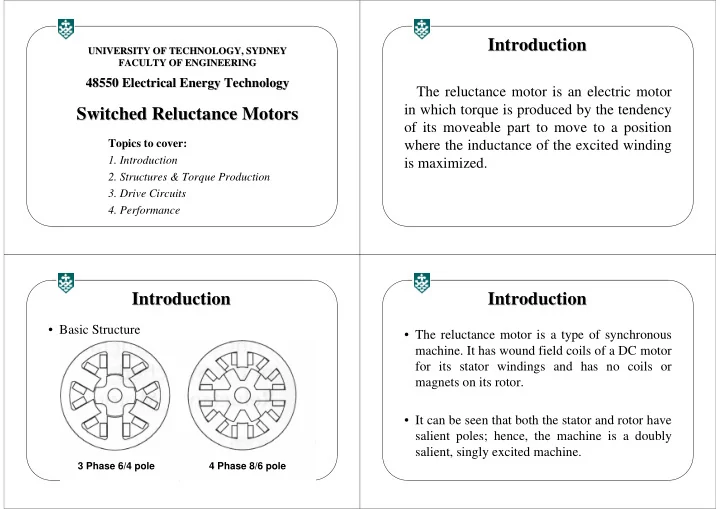
- Basic Structure
Introduction Introduction
3 Phase 6/4 pole 4 Phase 8/6 pole
- The reluctance motor is a type of synchronous
- machine. It has wound field coils of a DC motor
for its stator windings and has no coils or magnets on its rotor.
- It can be seen that both the stator and rotor have