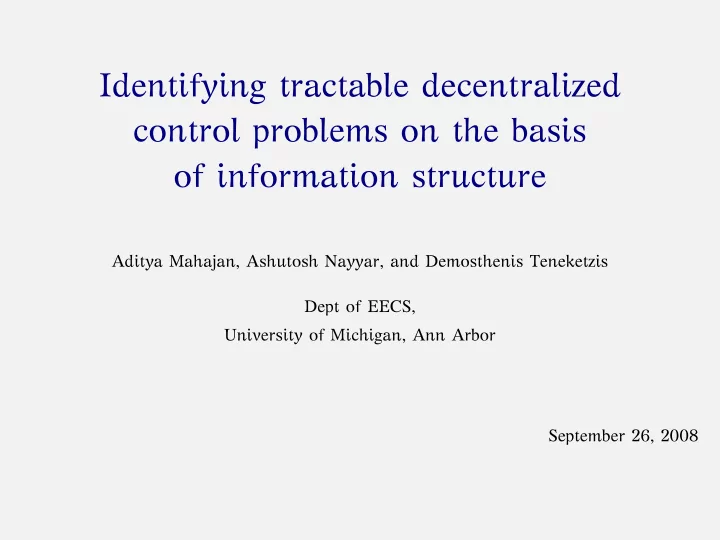
SLIDE 10 Common Agent's viewpoint
Xt Xt Qt Qt Yt Yt N1
t
N1
t Z1 t
Z1
t U1 t
U1
t M1 t
M1
t
N2
t
N2
t Z2 t
Z2
t U2 t
U2
t M2 t
M2
t
O0
t
O0
t
O1
t
O1
t
O2
t
O2
t
π0
t
π0
t
π1
t
π1
t
π2
t
π2
t
(^ g1
t,^
l1
t)
(^ g1
t,^
l1
t)
(^ g2
t,^
l2
t)
(^ g2
t,^
l2
t)
Variables Obs of CA Info states Control actions of CA
t0 t1 t2
- Consider three time steps t0, t1, and t2 in time interval t
S0
t = (Xt, M1 t−1, M2 t−1, U1 t−1, U2 t−1),
O0
t = Yt
S1
t = (Xt, M1 t−1, M2 t−1),
O1
t = −
S2
t = (Xt, M1 t, M2 t−1, U1 t),
O2
t = −
t,
⊲ Obs: Oi
t,
⊲ Control actions: (^ gk
t,^
lk
t)
From the common agent's viewpoint {S0
t, S1 t, S2 t, t = 1, . . . , T} is
a POMDP (partially observable Markov decision process)