
SLIDE 1
1
- Clique Trees 3
Let’s get BP right
Undirected Graphical Models
Here the couples get to swing!
Graphical Models – 10708 Carlos Guestrin Carnegie Mellon University October 25th, 2006
Readings: K&F: 9.1, 9.2, 9.3, 9.4 K&F: 5.1, 5.2, 5.3, 5.4, 5.5, 5.6
10-708 – Carlos Guestrin 2006
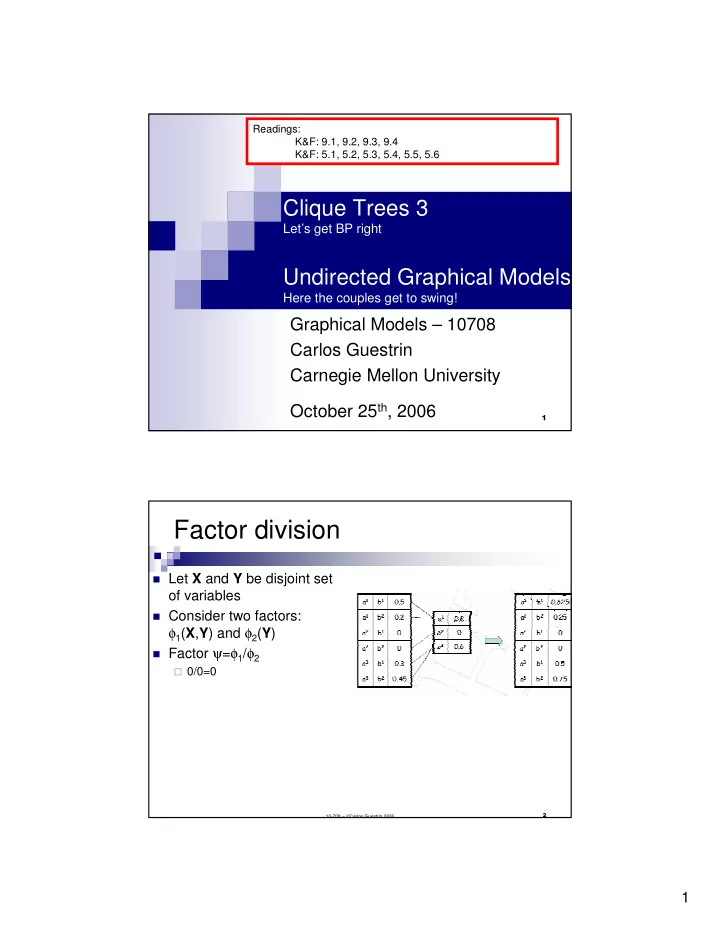
- Factor division
Let X and Y be disjoint set
- f variables
Consider two factors:
φ1(X,Y) and φ2(Y)
Factor ψ=φ1/φ2
0/0=0